![]()
MELSERVO-J4 Solutions vol.10 너트 러너 장치
현장의 과제를 완벽하게 해결!

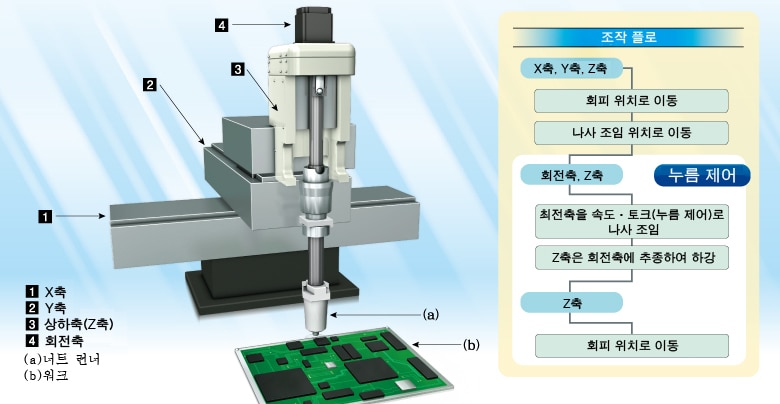

위치 제어 또는 속도 제어에서 압력 제어로 전환함으로써, 상하축(Z축), 회전축을 토크 센서 없이 나사로 조일 수 있습니다. 압력 제어는 속도 제어 또는 위치결정 제어에서 정지하지 않고 토크 제어로 전환하는 제어입니다.

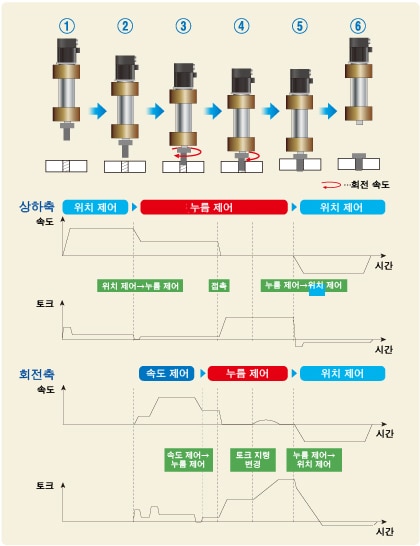
| [동작] | |
|---|---|
| ①→② | 상하축:임시 저장 위치에서 작업 위치까지 이동 회전축:서보 ON 상태에서 정지 중 |
| ② | 상하축:압력 제어로 전환 회전축:속도 제어로 전환하여 저속으로 기동 |
| ②→③ | 상하축:나사 조임 시작 회전축:중속도로 전환하여 나사 조임 |
| ③→④ | 상하축:나사를 일정 토크로 꽉 누름 회전축:압력 제어로 전환하여 나사 조임 |
| ④→⑤ | 상하축:나사를 일정 토크로 꽉 누름 회전축:지정 토크로 변경하여 나사 조임 |
| ⑤→⑥ | 상하축:위치 제어로 전환하여 임시 저장 위치까지 이동 회전축:위치 제어로 전환하여 임시 저장 위치까지 이동 |

모터 극수와 슬롯수의 조합을 최적으로 하여 전원 공급 토크 리플 대폭 절감
나사 조임시의 반복 정밀도를 개선할 수 있습니다.

모델 시스템
기기 구성
| PLC CPU:Q06UDEHCPU | 심플 모션 모듈:QD77MS4 | 서보 앰프:MR-J4(W3) -B |
| GOT:GOT1000 시리즈 | 입출력 모듈:QX40, QY40P | 서보 모터:HG-SR, HG-KR |
| 기본 베이스:Q35DB |

시스템 구성에서 서보 앰프를 설정합니다.
![]()

각 축의 서보 앰프를 설정합니다. 서보 어시스턴트 기능을 사용하면, 처음 접하시는 분도 쉽게 설정할 수 있습니다.
![]()

제어 모드 전환 등의 제어용 프로그램을 펑션 블록(FB)으로 쉽게 작성할 수 있습니다.