![]()
MELFA-Works(3차원 로봇 시뮬레이터)
3D-CAD 소프트웨어상에서 동작하는 3차원 로봇 시뮬레이터
PC 화면에서 로봇의 시뮬레이션을 실행할 수 있는 "MELFA-Works"
로봇 도입 전 레이아웃 검토 및 바탕 화면에서의 프로그램 디버그, 복잡 동작 경로 생성 등 다품종 소량 생산 시대에 부합하는 프로그래밍이 가능합니다.
사용 가능 데이터 형식
- SolidWorks®에서 설계ㆍ작성된 데이터를 주변장치로 배치하거나 핸드로 로봇에 장착하는 것이 가능합니다.
- 다른 CAD에서 작성된 데이터는 SolidWorks®에서 읽을 수 있는 3D-CAD 형식이면 사용할 수 있습니다.
(예:IGES, STEP, Parasolid… 등) - SolidWorks®가 대응하는 파일 형식은 SolidWorks사의 홈페이지 등에서 확인하십시오.
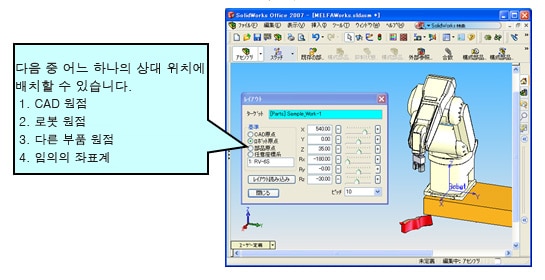
주변장치 읽기와 배치 변경
- SolidWorks®에서 작성된 부품, 범용 3차원 CAD 데이터를 주변장치에서 읽을 수 있습니다.
- 읽은 부품은 MELFA-Works상에서 CAD 원점이나 다른 부품에서의 상대 위치에서 배치할 수 있습니다.
또한, 수치 입력에 의한 배치 변경도 가능합니다. - 주행 축으로 하여 로봇에 장착하여 주행축 부착 시스템의 동작 검증이 가능합니다.
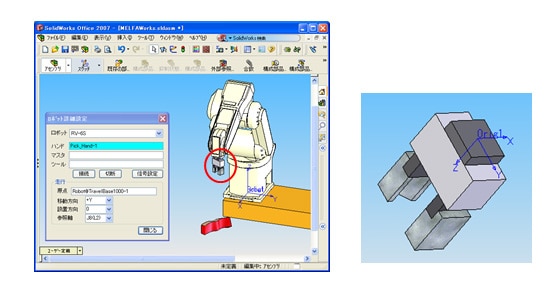
핸드 설치
- SolidWorks®에서 작성된 부품, 범용 3차원 CAD 데이터를 핸드로 로봇에 장착할 수 있습니다.
- 핸드에는 ATC(※ )의 지정도 가능합니다. (※ 핸드 끝 부분을 교환하기 위한 장치(Auto Tool Changer)의 약자)
- 핸드의 용도로 워크 핸들링용, 가공용 2종류를 취급할 수 있습니다.
(1) 워크 핸들링용:동시에 최대 8개의 워크를 가질 수 있습니다. 핸드 신호 제어에 의해 워크의 핸들링이 가능합니다.
(2) 가공용:레이저 용착, 실링 등 워크상의 특정 부위를 트레이스 하기 위해서 사용합니다. CAD 링크 기능 등에서 사용할 수 있습니다.
사용 가능 로봇
- MELFA 로봇 전용(F 시리즈, SD 시리즈, SQ 시리즈, S 시리즈, RP 시리즈)
- 여러 대의 로봇(최대 8대)을 설치할 수 있습니다.
- 사용 가능한 로봇 형명은 MELFA-Works 취급 설명서를 참조하십시오.