![]()
![]()

심플 모션 보드는 PCI Express® 대응 PC에 구성하여 위치결정 제어, 동기 제어, 속도ㆍ토크 제어 등 다양한 모션 제어를 실현합니다.

PC 환경에서
다양한 모션 제어 실현
간단 프로그래밍"
엔지니어링 소프트웨어
로 디버그 효율 향상
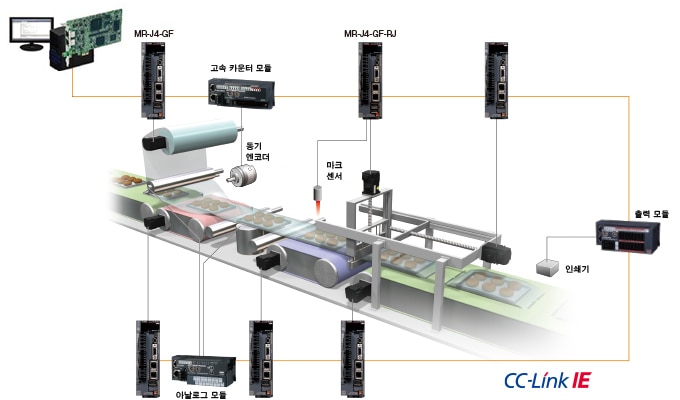
선진의 컴포넌트군을
하나의 네트워크에
기계에 최적의 제어 및 기능을 선택하여 최적의 솔루션을 실현할 수 있습니다.


하나의 네트워크에 연결
CC-Link IE 필드 네트워크
CC-Link IE 필드 네트워크는 모션 제어에 필요한 동기성과 Ethernet의 범용성을 양립시킨 네트워크입니다.
하나의 네트워크에서 서보 앰프, I/O, 고속 카운터 등 다양한 필드 기기를 자유롭게 접속할 수 있습니다.
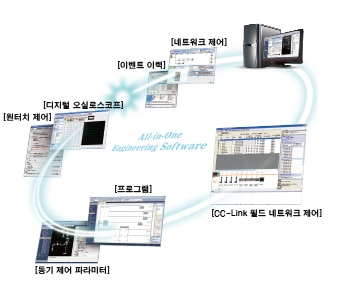
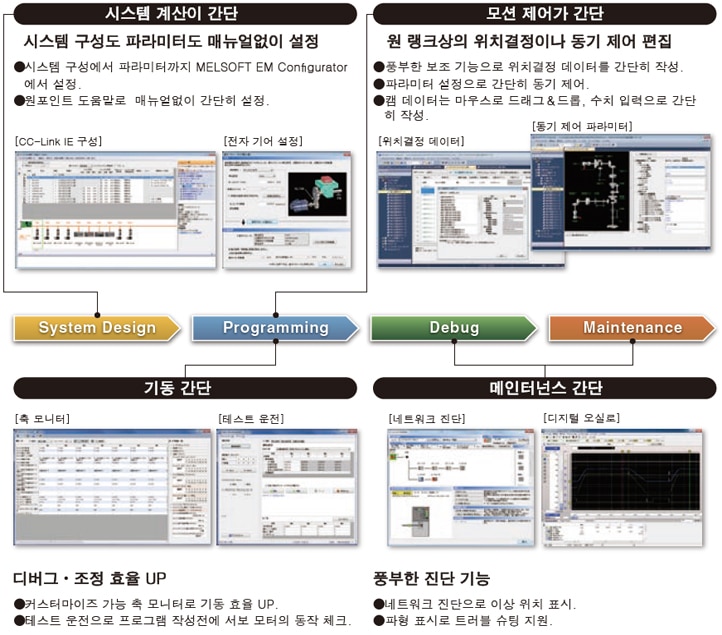
하나의 엔지니어링 소프트웨어로 쉽게 설정, 진단
엔지니어링 소프트웨어는 다양한 기능과 기술을 갖춘 간단하고 사용하기 쉬운 도구입니다.
심플 모션 보드의 파라미터 설정에서 서보 조정, 디버그까지 다양한 기능을 하나의 엔지니어링 소프트웨어만으로 대응할 수 있습니다.
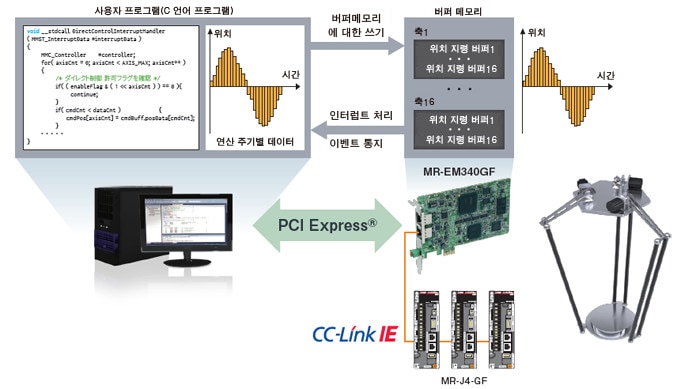
서보 지령 통신 주기에 맞추어 동기 엔코더값, 시트 장력값, 인쇄 출력 등 다양한 데이터를 입출력할 수 있으므로 모션 제어의 폭이 넓어집니다.
[서보 앰프 지령 통신 주기에 동기한 입출력 예]
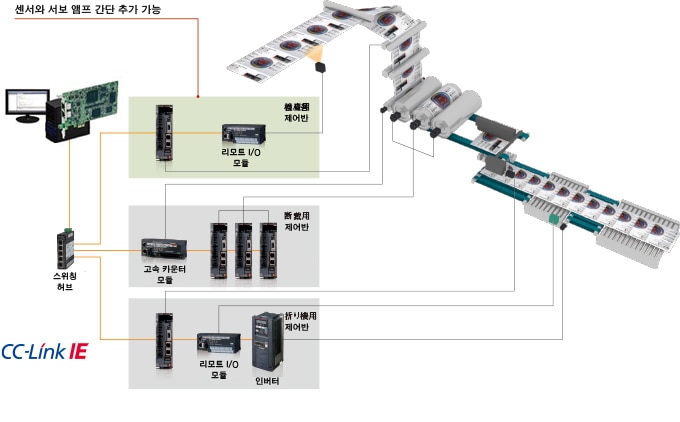
스위칭 허브를 접속하여 스타형, 라인형, 스타ㆍ라인형이 혼재된 네트워크 구축을 설정 없이 변경할 수 있습니다. 스위칭 허브의 빈 포트에 케이블을 연결하는 간단 배선에 의해 보다 자유롭게 필드 기기를 설치할 수 있습니다.
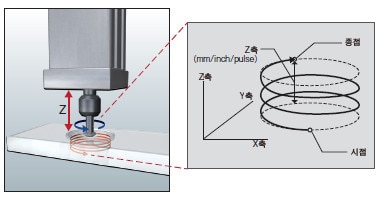
2축 원호 보간 제어에 직선 보간축(직선 제어)이 추종함으로써, 나선의 궤적을 그리는 제어입니다.
큰 구멍을 뚫는 볼링 용도에서는 X, Y, Z의 3축에서 헬리컬 보간을 실행합니다.
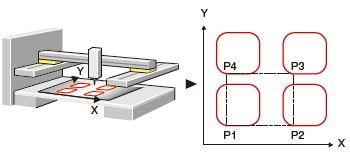
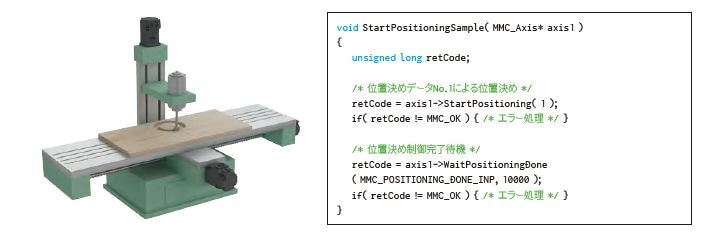
한번의 기동에서 여러 위치결정 데이터군에 따라 차례로 운전합니다. 같은 궤적을 몇번이고 반복하는 경우 등에 사용할 수 있습니다.
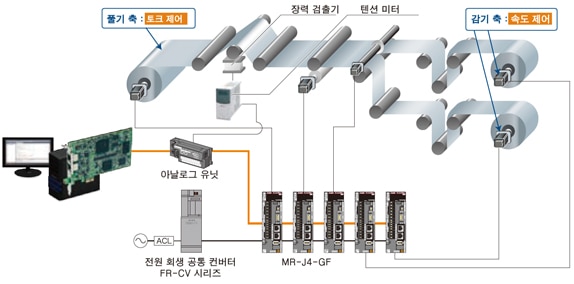
속도 제어는 속도 지령에 추종하여 속도를 일정하게 제어하며, 토크 제어는 지령 토크에 추종하여 토크를 일정하게 제어합니다.
풀기, 감기 등의 속도ㆍ토크 제어에도 심플 모션 보드를 사용할 수 있습니다.
속도ㆍ토크 제어 중에도 현재 위치 관리하고 있으므로, 위치 제어로 되돌린 후에도 절대 위치 좌표에서의 위치결정이 가능합니다.
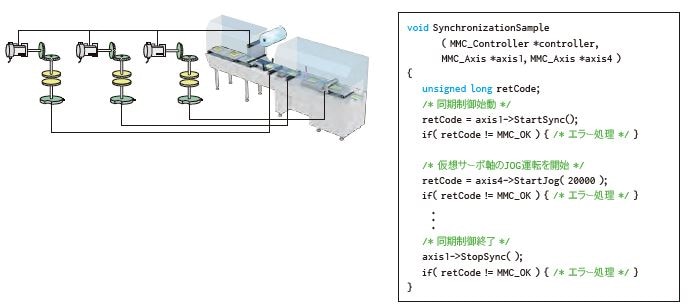
기어, 샤프트, 클러치, 변속기, 캠 등의 기계 장치를 소프트웨어로 대체한 동기 제어가 가능합니다. 캠 자동 생성 기능에 의해 간편하게 캠 생성을 실행할 수 있습니다. 축마다 동기 제어를 기동, 정지할 수 있으므로, 동기 제어 축과 위치결정 제어 축의 혼재가 가능합니다.
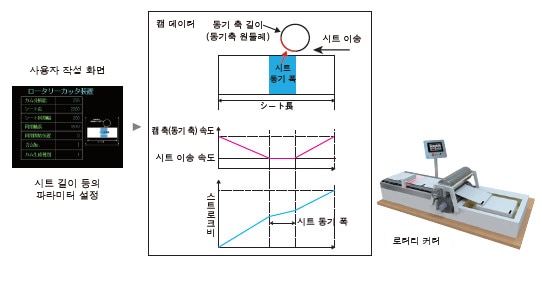
파라미터를 설정하기만 하면, 로터리 커터용 캠 데이터를 자동으로 생성할 수 있습니다.
시트 길이, 동기 폭, 캠 분해능 등을 입력하면 캠 데이터를 쉽게 작성할 수 있습니다.
사용자 프로그램에서 세트된 연산 주기별 위치 지령을 서보 앰프에 송신하여 서보 앰프를 다이렉트로 제어하는 기능입니다.
※1: 패러렐 링크 로봇의 각 축의 좌표 변경은 사용자 프로그램에 의해 실행하십시오.
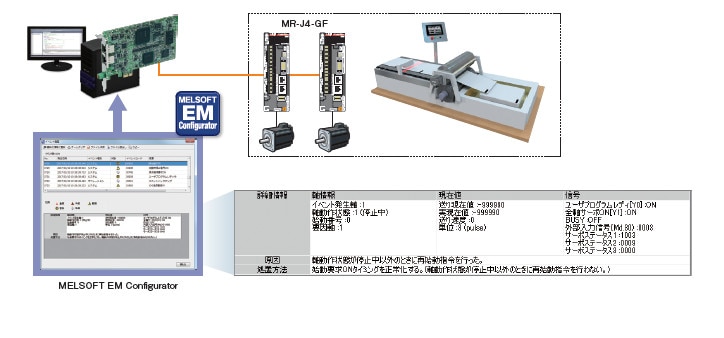
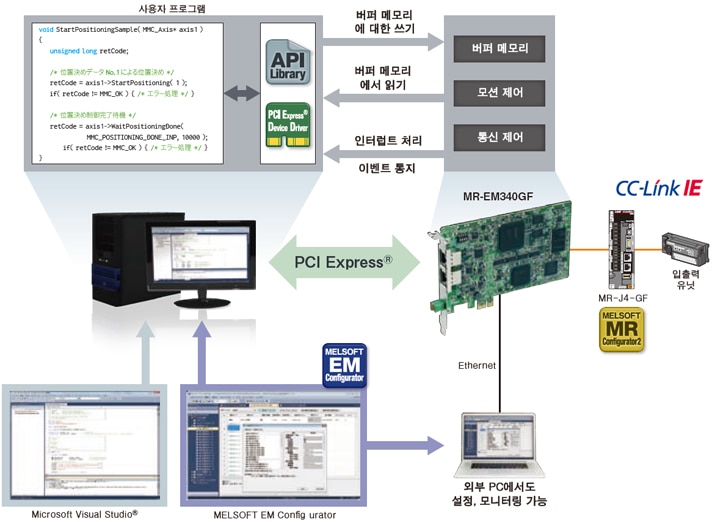
각 슬레이브 기기, 서보 앰프에서 발생한 이벤트를 심플 모션 보드에 저장할 수 있습니다.
프로그램 쓰기 조작, 에러 발생 등의 정보가 시간별로 일람으로 표시되므로, 트러블 발생시 원인 확인, 서보 앰프 복구를 신속하게 대응할 수 있습니다.
MELSOFT EM Software Development Kit는 심플 모션 보드의 시스템 설계ㆍ프로그래밍에서 디버그, 보수까지 모든 기능에 대응할 수 있는 소프트웨어 개발 킷입니다.
![]() MELSOFT EM Configurator
MELSOFT EM Configurator
시스템 설계ㆍ프로그래밍에서 디버그, 보수까지 모든 기능에 대응할 수 있습니다.
![]() MELSOFT MR Configurator2
MELSOFT MR Configurator2
서보 앰프와 접속하여 서보 조정, 모니터, 진단 등을 쉽게 실행할 수 있습니다.
![]() API 라이브러리
API 라이브러리
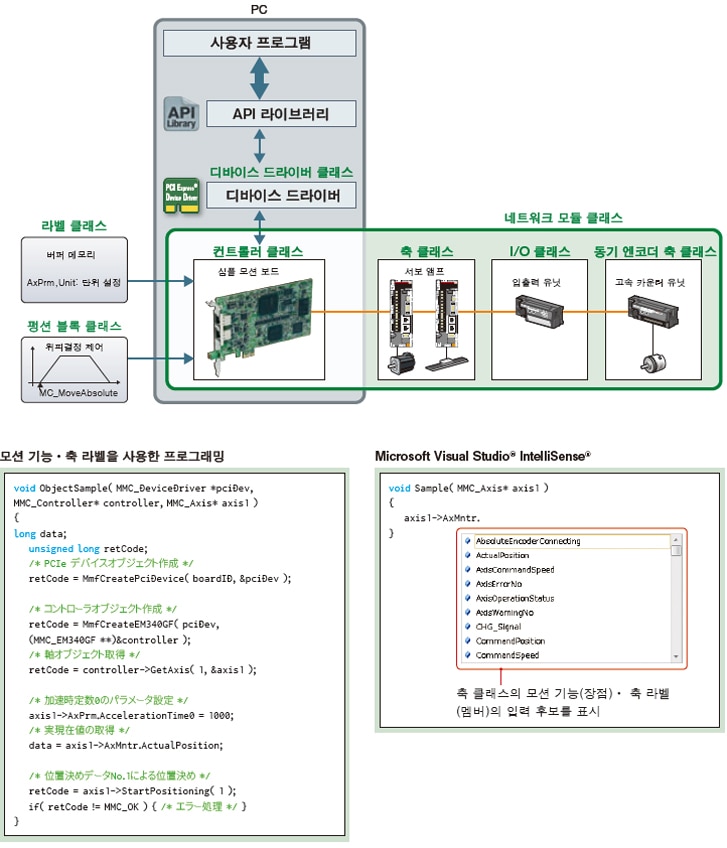
컨트롤러 클래스나 축 클래스 등의 기능(메소드)ㆍ라벨(멤버)을 사용하여 쉽게 Visual C++®에 의해 프로그래밍할 수 있습니다.
![]() PCI Express® 디바이스 드라이버
PCI Express® 디바이스 드라이버
사용자 프로그램에서 PCI Express® 경유로 심플 모션 보드에 액세스하는 소프트웨어입니다.
※ 최신의 소프트웨어 개발 킷은 미쓰비시전기 FA 사이트에서 다운로드할 수 있습니다.
Microsoft Visual Studio®의 프로젝트에 모션 제어용 API 라이브러리를 추가하여 사용자 프로그램을 작성합니다.
리얼타임 OS(INtime®, RTX)에 대응.
※1: 상세 내용에 대해서는 당사에 문의하십시오.
주: OS 및 개발 환경은 고객이 준비하십시오.
API 라이브러리에서는 컨트롤러 클래스, 축 클래스 등의 기능(메소드)ㆍ라벨(멤버)을 사용하여 프로그래밍 합니다.
[API 라이브러리에서 사용하는 클래스의 개념도]
심플 모션 보드와 조합한 최적의 솔루션에 의한 생산성 향상에 기여하고 있습니다.
여러 축의 위치결정, 동기 제어 등 폭넓은 모션 제어가 가능한 모션 모드와 1축에서 위치결정할 수 있는 I/O 모드가 있으며, 용도에 따라 구분하여 사용할 수 있습니다.
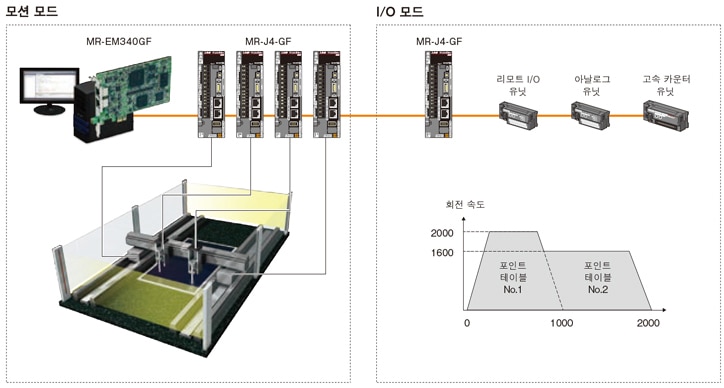
심플 모션 보드와 조합하면 여러 축의 위치결정, 동기 제어, 속도ㆍ토크 제어 등의 선진 모션 제어를 실행할 수 있습니다.
서보 앰프에 내장하고 있는 위치결정 기능을 사용하여 벨트 컨베이어, 회전 테이블, 볼스크류 등을 쉽게 구동할 수 있습니다.
| 심플 모션 보드 | ||||
|---|---|---|---|---|
| MR-EM340GF | ||||
| 최대 제어 축수 (가상 서보 앰프축 포함) |
16축 | |||
| 서보 앰프 접속 방식 | CC-Link IE Field (1Gbps) | |||
| 서보 앰프 간 최대 접속 거리[m] |
100 | |||
| 접속 서보 앰프 | MR-J4-GF, MR-J4-GF-RJ | |||
| 연산 주기[ms] | 0.5, 1.0, 2.0, 4.0 | |||
| 엔지니어링 환경 | MELSOFT EM Software Development Kit | |||
| 제어 방식 | 위치결정 제어, 궤적 제어(직선, 원호, 헬리컬과도 설정 가능), 속도 제어, 속도ㆍ토크 제어 | |||
| 제어 단위 | mm, inch, degree, pulse | |||
| 위치결정 데이터수 | 600데이터(위치결정 데이터 No.1~600)/축 | |||
| 가감속 방식 | 사다리꼴 가감속, S자 가감속 | |||
| 수동 제어 | JOG 운전, 수동 펄스 발생기 운전, 인칭 운전 | |||
| 확장 제어 | 다이렉트 제어 | |||
| 제어 내용 변경 기능 | 현재값 변경, 목표 위치 변경 기능, 토크 제한값 변경, 속도 변화, 오버라이드 기능, 가감속 시간 변경 기능 | |||
| 원점복귀 방식 | 드라이버 원점복귀 | |||
| 보조 기능 | 비상 정지 기능, H/W 스트로크 리미트 기능, S/W 스트로크 리미트 기능, 절대 위치 시스템, 앰프 없음 운전 기능, 무한 길이 이송 기능, 임의의 데이터 모니터 기능, 마크 검출 기능, 플래시 ROM 백업, M코드 출력 기능, 이벤트 이력, 디지털 오실로스코프 기능, 캠 자동 생성 기능 |
|||
| 입출력 점유 점수 | 32점(I/O 할당:인텔리전트 기능 유닛 32점) | |||
| 소비 전류[A] | DC12V | 0.4 | ||
| DC3.3V | 0.6 | |||
| 중량[kg] | 0.13 | |||
| 심플 모션 보드 | |||
|---|---|---|---|
| MR-EM340GF | |||
| 1네트워크당 최대 링크 점수 |
RX | 16K점(16384점, 2KB) | |
| RY | 16K점(16384점, 2KB) | ||
| RWr | 8K점(8192점, 16KB) | ||
| RWw | 8K점(8192점, 16KB) | ||
| 1국당 최대 링크 점수 |
마스터국 | RX | 16K점(16384점, 2KB) |
| RY | 16K점(16384점, 2KB) | ||
| RWr | 8K점(8192점, 16KB) | ||
| RWw | 8K점(8192점, 16KB) | ||
| 로컬국 | RX | 2K점(2048점, 256바이트) | |
| RY | 2K점(2048점, 256바이트) | ||
| RWr | 256점, 512바이트 | ||
| RWw | 256점, 512바이트 | ||
| 인텔리전트 디바이스국 |
RX | 2K점(2048점, 256바이트) | |
| RY | 2K점(2048점, 256바이트) | ||
| RWr | 256점, 512바이트 | ||
| RWw | 256점, 512바이트 | ||
| 리모트 디바이스국 |
RX | 128점, 16바이트 | |
| RY | 128점, 16바이트 | ||
| RWr | 64점, 128바이트 | ||
| RWw | 64점, 128바이트 | ||
| Ethernet부 | 통신 속도 | 1Gbps | |
| 접속 케이블 | 1000BASE-T의 규격을 만족하는 Ethernet 케이블※1:카테고리 5e 이상 (이중 실드ㆍSTP) 스트레이트 케이블 |
||
| 최대 국간 거리[m] | 최대 100(ANSI/TIA/EIA-568-B(Category 5e)에 준거 | ||
| 전송로 형식 | 라인형, 스타형(라인형과 스타형의 혼재도 가능) | ||
| 총연장 거리 | 라인 접속시[m] | 12000(마스터국 1대, 슬레이브국 120대 접속시) | |
| 스타 접속시※2 | 시스템 구성에 따름 | ||
| 1네트워크당 최대 접속 국수 | 121대(마스터국 1대, 슬레이브국 120대) | ||
| 최대 네트워크수 | 239 | ||
※1: CC-Link IE 필드 네트워크의 배선에는 CC-Link 협회의 권장 배선 부품을 사용하십시오.
CC-Link IE 필드 네트워크에는 CC-Link IE 컨트롤러 네트워크용 케이블은 사용할 수 없습니다.
※2: 스타형 배선의 경우, 스위칭 허브가 필요합니다.
