![]()
![]()


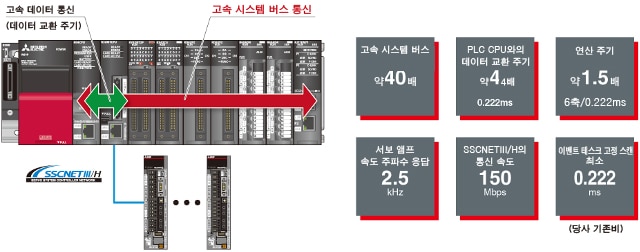
기계 제어의 PLC 실행 엔진과 모션 제어의 실행 엔진. "MELSEC iQ-R 시리즈"는 2개의 엔진을 고속 시스템 버스로 데이터 연계하여, 각각 전문으로 하는 제어의 분산 처리를 실현하였습니다. 싱글 엔진에 비해 부하 변동이 있는 장치 및 축수가 많은 장치에 대해서도 부하를 분산할 수 있으므로, 성능을 최대한으로 발휘할 수 있습니다.

업계 최고 수준의 성능을 실현함과 동시에 "사람", "환경"에도 배려한 서보 앰프 "MR-J4 시리즈"에 담았습니다. 광네트워크 "SSCNETⅢ/H"에서 접속함으로써, 서보 앰프의 실행 엔진과 고분해능 엔코더를 사용한 고속ㆍ고정밀도 제어를 실현합니다.
충실한 라인업으로 고객의 장치에 맞추어 최적의 엔진의 조합을 선택함으로써, 불필요한 비용을 억제하면서 성능을 최대한으로 발휘합니다. 장치의 성능 업에 추가하여 설계, 디버그 효율 향상을 도모할 수 있습니다.

시간이 걸리는 프로그램 개발은 생산성을 크게 좌우합니다. "MELSEC iQ-R 시리즈"는 개발, 설계, 디버그, 기동 등의 효율 향상에 기여합니다.


iQ Platform만 가능한 듀얼 구동 엔진을 탑재한 "MELSEC iQ-R 시리즈". 파트너 기업과의 연계로 그 가능성을 더욱 넓혀가고 있습니다. 예를 들어, 스테핑 모터, 다이렉트 드라이브 모터를 비롯한 한 SSCNETⅢ/H 대응 파트너 제품도 다양하게 준비하여 장치의 혁신을 가속합니다.


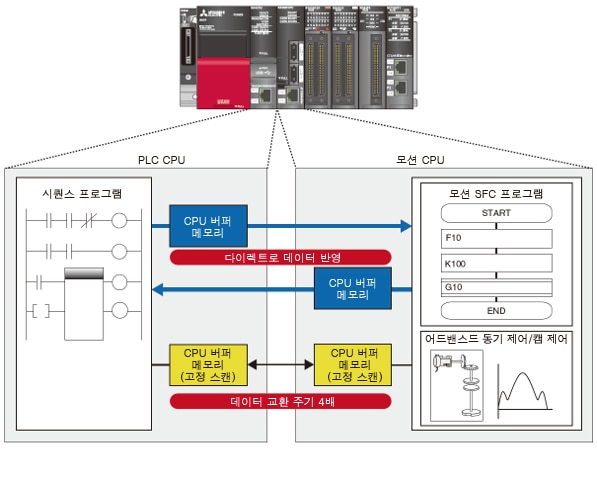
용도에 따라 모션 CPU, PLC CPU를 선택함으로써, 유연한 시스템 구성을 실현할 수 있습니다.
보기 쉽고 이해하기 쉬운 플로차트 형식의 모션 SFC로 모션 제어 프로그램을 작성할 수 있습니다.
또한, 다이렉트 위치결정 기동 명령에 의해 시퀀스 프로그램만으로 위치결정 제어, 동기 제어 등 모션 제어를 프로그래밍할 수 있습니다.
고속ㆍ대용량의 CPU 버퍼메모리로 CPU 간의 데이터 교신에 혁신을 가져왔습니다.
PLC CPU와 모션 CPU 간에 CPU 버퍼메모리가 있어, 2종류의 용도에 사용할 수 있습니다.
모션 CPU는 2M워드, PLC CPU는 512K워드의 CPU 버퍼메모리를 표준 탑재하고 있습니다.
CPU 간 대량 데이터 전송이나 즉시 반영하고자 하는 데이터의 업데이트에 도움이 됩니다.
PLC CPU의 버퍼메모리를 사용한 예
512K워드의 버퍼메모리 영역을 사용함으로써, 고분해능의 캠 데이터 등이 큰 데이터를 한번에 전송할 수 있습니다.
모션 CPU의 버퍼메모리를 사용한 예
모션 CPU측에서 설정한 데이터를 시퀀스 프로그램의 인터록에 시간 지연 없이 즉시 사용할 수 있습니다.
PLC CPU와 모션 CPU 간을 0.222ms마다 데이터 전송할 수 있습니다. CPU 버퍼메모리(고정 스캔 통신 영역)는 모션 제어에 동기하고 있으며, 제어의 불필요한 시간을 단축할 수 있습니다.
모션 CPU에서는 모션 제어 프로그램을 "모션 SFC(Sequential Function Chart) 기능"에 의해 플로차트 형식으로 기술합니다. 모션 CPU의 프로그램을 이벤트 처리에 적절한 모션 SFC로 기술함으로써, 기계의 일련의 동작을 모션 CPU에서 일괄 제어하여 이벤트 응답성을 추구합니다.
보기 쉽고 이해하기 쉬운 플로차트 기술
기계의 일련의 동작을 모션 CPU에서 제어
※ SSCNET (Servo System Controller Network)
PTP 제어에서 위치 추종, 연속 궤적 등 용도에 적합한 다양한 위치결정 제어가 가능합니다.
기어, 샤프트, 클러치, 변속기, 캠 등의 기계 장치를 소프트웨어로 대체한 동기 제어에 추가하여 캠 자동 생성 기능으로 캠을 쉽게 생성할 수 있습니다. 축마다 동기 제어를 기동, 정지할 수 있습니다. 동기 제어의 축과 위치결정 제어의 축의 혼재가 가능합니다.
또한, 동기 제어 중 속도ㆍ토크 제어도 가능합니다.
동기 엔코더축 및 서보 입력축에서 모든 축을 동기시킵니다.
용도포장기, 인쇄기, 위생 제조 장치, 타이어 성형기 등
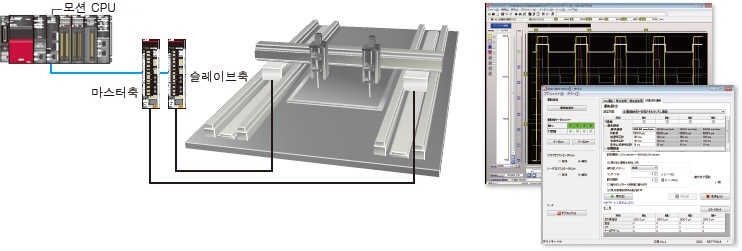
2축이 동기하여 이동하는 장치입니다. 축 2를 축 1에 동기시키는 설정으로 동기 제어를 실행합니다. 다른 축은 일반 위치결정을 실행할 수 있습니다.
용도텐덤 구동 등
모션 컨트롤러를 3대 사용하면, 최대 192축 ![]() 의 서보 모터를 고정밀도로 동기 제어할 수 있으므로 대규모 시스템에 대응 가능합니다.
의 서보 모터를 고정밀도로 동기 제어할 수 있으므로 대규모 시스템에 대응 가능합니다.
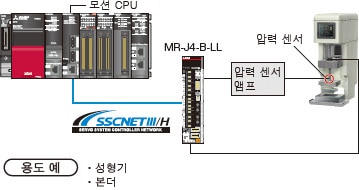
압력 지령과 압력 센서값이 일치하도록 제어하여, 부하가 변동되어도 실제 압력을 일정으로 유지할 수 있습니다.
이송, 보압, 압빼기 공정을 압력 프로파일로 MELSOFT MT Works2에 의한 압력 제어의 테스트 운전을 실행하여 셋업 변경 및 조정을 쉽게 할 수 있습니다.

테스트 모드에서는 엔지니어링 도구에서 축의 시운전이나 조정을 실행합니다.
텐덤 장치와 같이 여러 축이 동시에 동작하는 장치를 가지고 있는 장치에서 서보를 쉽게 조정하여 장치의 기동 시간을 줄일 수 있습니다.
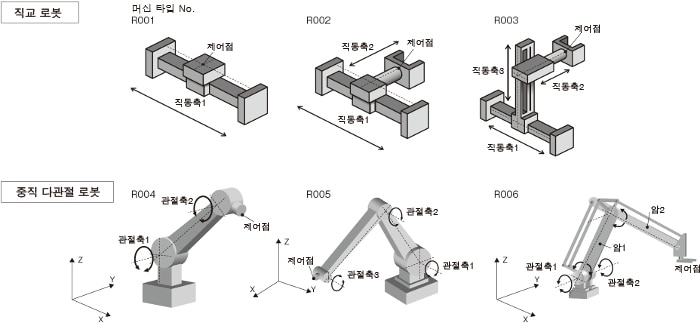
장치에 맞추어 머신 라이브러리를 인스톨하면 간이 로봇에 대응할 수 있습니다.
제어 방식은 XYZ 직교좌표 공간을 제어하는 머신 제어가 됩니다.
머신 라이브러리는 미쓰비시전기 FA 사이트에서 다운로드할 수 있습니다.
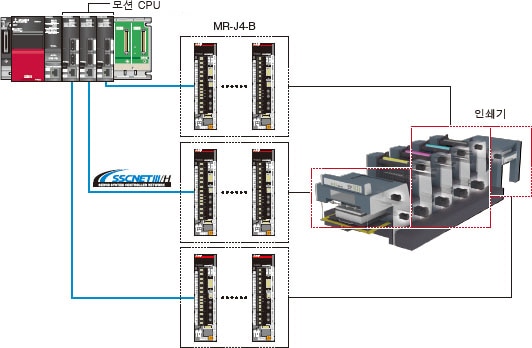
서보 시스템 네트워크 SSCNETⅢ/H 통신에 접속하여 3 분기를 가능하게 하는 광분기 유닛 MR-MV200.
분기함으로써 SSCNETⅢ/H에 접속할 수 있는 기기를 유연한 배선으로 분산 배치할 수 있습니다.
메인터넌스시 장치 전체를 정지하지 않고 장치 가동률을 향상시킬 수 있습니다.
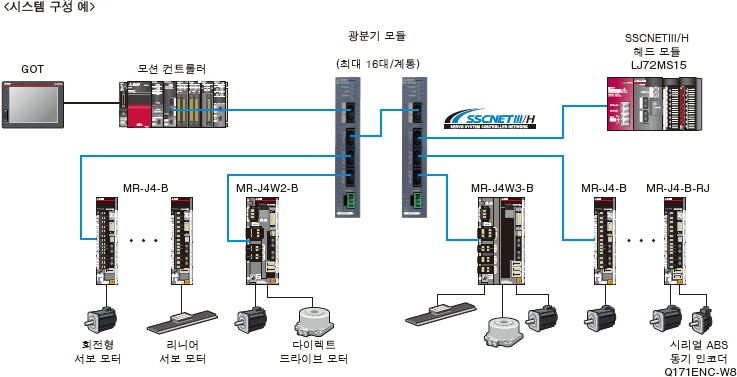
※ 광분기 유닛 사용시는 반드시 시스템 설정의 SSCNET 설정이 "SSCNETⅢ/H"인지를 확인하십시오.
| 모션 컨트롤러 | |||
|---|---|---|---|
| R64MTCPU | R32MTCPU | R16MTCPU | |
| 최대 제어 축수 | 64축(1 계통 최대 32축) | 32축(1 계통 최대 16축) | 16축 |
| 서보 앰프 I/F | SSCNETⅢ/H | ||
| 접속 서보 앰프 | MR-J4-B자세한 내용은 여기 | ||
| 연산 주기 (연산 주기 설정) |
0.222ms~ | ||
| 엔지니어링 환경 | MELSOFT MT Works2 | ||
| 프로그램 방식 | 모션 SFC, 다이렉트 위치결정 기동 명령 | ||
| 제어 방식 | 위치 제어, 속도 제어, 토크 제어 어드밴스드 동기 제어, 머신 제어  |
||
| 위치결정 제어 |
직선 보간, 원호 보간, 궤적 제어, 헬리컬 보간, 위치 추종 제어 고속 진동 제어, 속도 위치 전환 제어? |
||
| 가감속 처리 |
사다리꼴 가감속, S자 가감속,어드밴스드 S자 가감속 |
||
| 수동 제어 | JOG 운전, 수동 펄스 발생기 운전, 동시 JOG 운전 | ||
| 제어 내용 변경 기능 | 현재값 변경, 목표 위치 변경 기능, 토크 제한값 변경, 속도 변경 | ||
| 원점복귀 방식 |
근점 도그식 1, 근점 도그식 2, 스케일 원점 신호 검출식, 카운트식 1, 카운트식 2, 카운트식 3, 데이터 세트 방식 1, 데이터 세트 방식 2, 도그 크래들식, 스토퍼 정지 방식 1, 스토퍼 정지 방식 2, 리미트 스위치 겸용식, Doggles 원점 신호 기준식 |
||
| 보조 기능 |
비상 정지 기능, H/W 스트로크 리미트 기능, S/W 스트로크 리미트 기능, 절대 위치 시스템, 앰프 없음 운전 기능, 무한 길이 이송 기능, 임의의 데이터 모니터 기능, 마크 검출 기능 M코드 출력 기능, 에러 이력, 디지털 오실로스코프 기능 보안 기능 |
||
| DC5V 내부 소비 전류[A] | 1.20 | ||
| 중량[kg] | 0.28 | ||