![]()
![]()


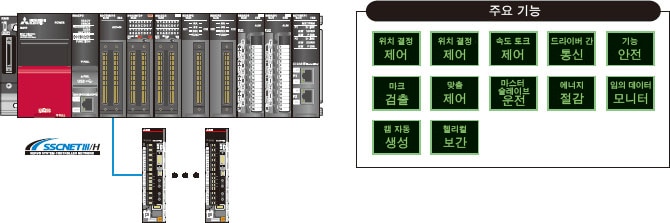
기계 제어의 PLC 실행 엔진과 모션 제어의 실행 엔진. "MELSEC iQ-R 시리즈"는 2개의 엔진을 고속 시스템 버스로 데이터 연계하여 각각 전문으로 하는 제어의 분산 처리를 실현하였습니다. 싱글 엔진에 비해 부하 변동이 있는 장치 및 축수가 많은 장치에 대해서도 부하를 분산할 수 있으므로, 성능을 최대한으로 발휘할 수 있습니다.

업계 최고 수준의 성능을 실현함과 동시에 "사람", "환경"에도 배려한 서보 앰프 "MR-J4 시리즈"에 담았습니다. 광네트워크 "SSCNETⅢ/H"에서 접속하여 서보 앰프의 실행 엔진과 고분해능 엔코더를 사용한 고속ㆍ고정밀도 제어를 실현합니다.
충실한 라인업으로 고객의 장치에 맞추어 최적의 엔진의 조합을 선택함으로써, 불필요한 비용을 억제하면서 성능을 최대한으로 발휘합니다. 장치의 성능 향상에 추가하여 설계, 디버그 효율 향상을 도모할 수 있습니다.

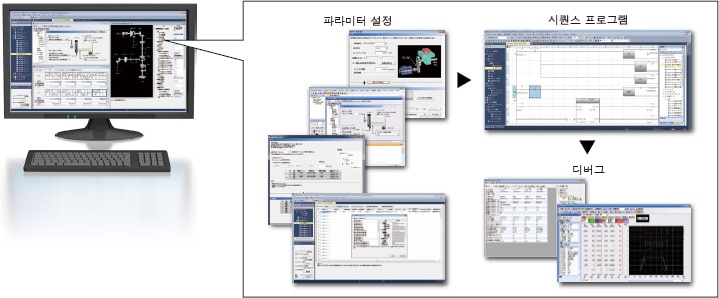
시간이 걸리는 프로그램 개발은 생산성을 크게 좌우합니다. "MELSEC iQ-R 시리즈"는 개발, 설계, 디버그, 기동까지 한번에 효율을 향상합니다.


iQ Platform만 가능한 듀얼로 구동하는 엔진을 탑재한 "MELSEC iQ-R 시리즈". 파트너 기업과의 연계로 그 가능성을 더욱 넓혀가고 있습니다. 예를 들어, 스테핑 모터, 다이렉트 드라이브 모터를 비롯한 한 SSCNETⅢ/H 대응 파트너 제품도 다양하게 준비하여 장치의 혁신을 가속합니다.


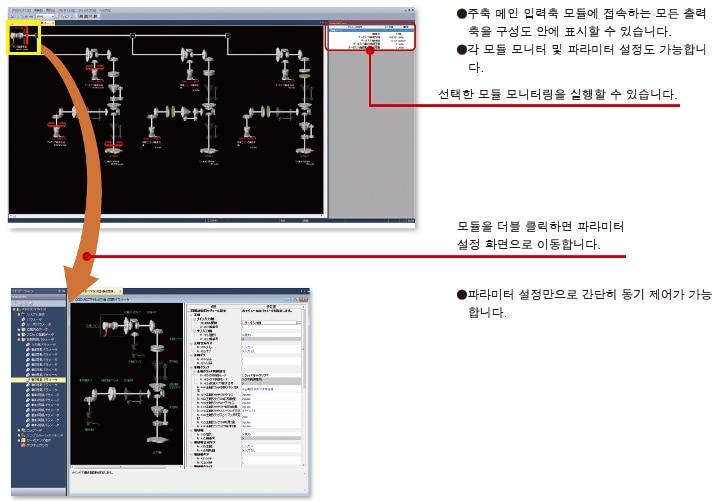
1개의 엔지니어링 도구에서 심플 모션 유닛, 서보 앰프를 사용한 서보 시스템의 프로그래밍에서 디버그까지 대응할 수 있습니다.
심플 모션 유닛의 기본 성능 향상에 의해 택-타임의 절감이 가능합니다.

포인트 테이블 방식으로 쉽게 위치결정 제어가 가능합니다.
기어, 샤프트, 클러치, 변속기, 캠 등의 기계 장치를 소프트웨어로 대체한 동기 제어에 추가하여 캠 자동 생성 기능으로 캠을 쉽게 생성할 수 있습니다. 축마다 동기 제어를 기동, 정지할 수 있으므로, 동기 제어 축과 위치결정 제어 축의 혼재가 가능합니다.

동기 엔코더축 및 서보 입력축에서 모든 축을 동기시킵니다.
용도포장기, 인쇄기, 위생 제조 장치, 타이어 성형기 등
2축이 동기하여 이동하는 장치입니다. 2축만 동기 제어를 실행하고, 다른 축은 일반 위치결정을 실행할 수 있습니다.
용도텐덤 구동 등
어드밴스드 동기 제어의 기계 구성 표시 및 대상 유닛의 모니터링이 가능하므로, 디버그 효율 향상을 도모할 수 있습니다.
동기 제어의 출력축은 캠 동작이 됩니다.
캠 동작에는 직선 동작, 왕복 동작, 이송 동작이 있으며, 용도에 따라 선택할 수 있습니다.
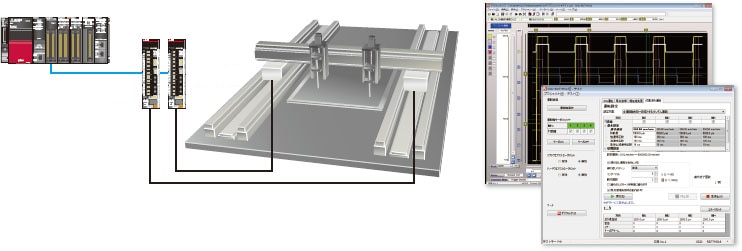
MELSOFT GX Works3의 시뮬레이터를 사용하면 프로그램의 동작을 실제 기기 없이 디버그 단계에서 확인할 수 있으므로, 시운전 시간 단축을 도모할 수 있습니다.

위치결정 테스트에서는 엔지니어링 도구에서 축의 시운전이나 조정을 실행합니다.
텐덤 장치와 같이 여러 축이 동시에 동작하는 장치를 가지고 있는 장치에서 서보를 쉽게 조정하여 장치의 기동 시간을 줄일 수 있습니다.
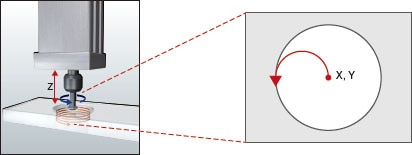
큰 구멍을 뚫는 볼링 용도에서는 X, Y, Z의 3축으로 헬리컬 보간을 실행합니다.
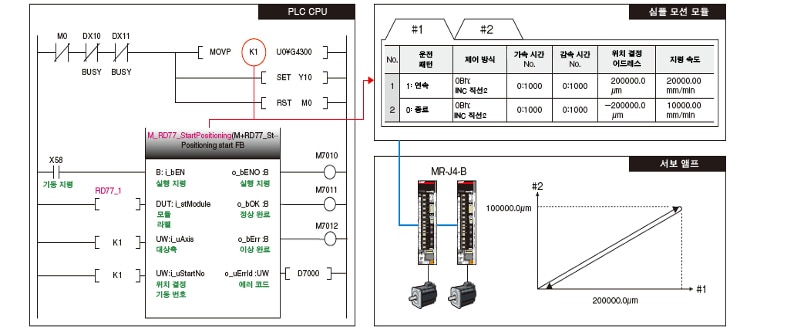
시퀀스 프로그램, 펑션 블록에서 버퍼메모리에 위치결정 데이터를 쓰는 것만으로 직선 보간 등을 쉽게 실행할 수 있습니다.
| 심플 모션 유닛 | ||||
|---|---|---|---|---|
| RD77MS16 | RD77MS8 | RD77MS4 | RD77MS2 | |
| 서보 앰프 접속 방식 | SSCNETⅢ/H (150Mbps) | |||
| 서보 앰프 간 최대 접속 거리[m] |
100 | |||
| 접속 서보 앰프 | MR-J4(W)-B자세한 내용은 여기 | |||
| 최대 제어 축수 (가상 서보 앰프축 포함) |
16축 | 8축 | 4축 | 2축 |
| 연산 주기[ms] (연산 주기 설정) |
0.444ms, 0.888ms, 1.777ms, 3.555ms | |||
| 엔지니어링 환경 | MELSOFT GX Works3 | |||
| 제어 방식 |
위치 제어, 속도 제어, 토크 제어 어드밴스드 동기 제어 |
|||
| 제어 단위 | mm, inch, degree, pulse | |||
| 위치결정 데이터수 | 600데이터(위치결정 데이터 No.1~600)/축 (MELSOFT GX Works3, 시퀀스 프로그램에서 설정 가능) |
|||
| 가감속 방식 | 사다리꼴 가감속, S자 가감속 | |||
| 위치결정 제어 |
직선 보간(최대 4축), 2축 원호 보간, 3축 헬리컬 보간, 속도 위치 전환 제어(ABS/INC), 위치 속도 전환 제어(INC), 현재값 변경 |
|||
| 수동 제어 | JOG 운전, 수동 펄스 발생기 운전, 인칭 운전 | |||
| 제어 내용 변경 기능 |
목표 위치 변경 기능 가감속 시간 변경 기능 |
|||
| 원점복귀 방식 | 근점 도그식, 카운트식 1, 카운트식 2, 데이터 세트 방식, 스케일 원점 신호 검출식 | |||
| 보조 기능 |
비상 정지 기능, H/W 스트로크 리미트 기능, S/W 스트로크 리미트 기능, 절대 위치 시스템, 앰프 없음 운전 기능, 무한 길이 이송 기능, 임의의 데이터 모니터 기능 플래시 ROM 백업, 이벤트 이력 기능, M코드 출력 기능, 디지털 오실로스코프 기능, 캠 자동 생성 기능 |
|||
| 입출력 점유 점수 | 32점(I/O 할당:인텔리전트 기능 유닛 32점) | |||
| DC5V 내부 소비 전류[A] | 1.0 |
|||
| 중량[kg] | 0.23 | 0.22 | ||