![]()
![]()
MELSEC-L 시리즈는 베이스 불필요 구조를 채택하여 제어반 내의 공간 절약을 실현하였습니다.
유닛 확장시는 베이스의 슬롯수에 따른 제약을 받지 않으며, 필요한 유닛을 필요한 만큼 접속하기만 하면 보다 편리성 높은 설계가 가능합니다.

PLC CPU에서 심플 모션의 위치결정을 기동합니다.
심플 모션은 지정된 위치결정 데이터 No.에서 운전을 시작하여, 운전 패턴이 종료될 때까지 운전을 계속합니다.
기어, 샤프트, 변속기, 캠 등의 기계 장치를 소프트웨어로 대체한 동기 제어를 쉽게 실현할 수 있습니다.

동기 엔코더로부터의 입력 펄스 및 가상 서보 앰프에 동기하여 동기 제어, 캠 제어를 실행할 수 있습니다.
심플 모션 유닛(LD77MH)의 프로젝트 및 시퀀스 프로그램은 심플 모션 유닛(LD77MS)의 프로젝트으로 쉽게 대체 가능합니다.
Easy to Use !
사용하기 쉬운 조작성의 엔지니어링 환경(MELSOFT GX Works2의 심플 모션 유닛 설정 도구)이 강력하게 지원합니다.
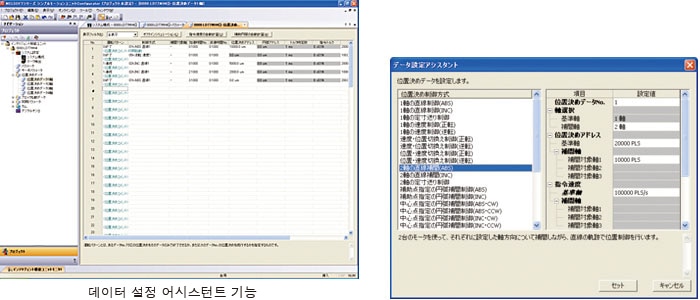
ㆍ위치결정 데이터
데이터 설정 어시스턴트 기능, 보조 원호 자동 계산 등의 기능으로 쉽게 위치결정 데이터를 설정할 수 있습니다.
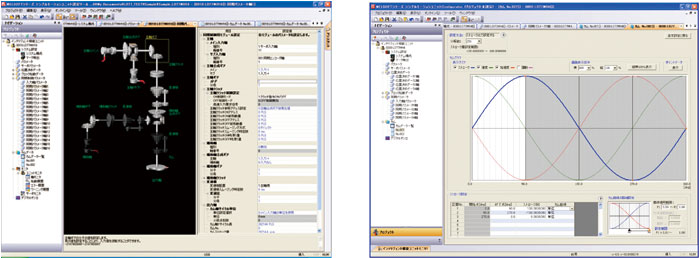
ㆍ동기 제어 파라미터
그래픽 화면에서의 직감적인 설정만으로 복잡한 동기 제어를 실현할 수 있습니다.
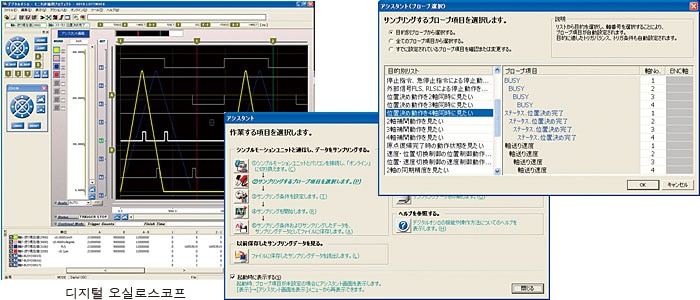
ㆍ디지털 오실로스코프
모션 연산 주기에 동기한 데이터 수집과 파형 표시에 의해 동작 확인, 트러블슈팅을 강력하게 지원합니다.
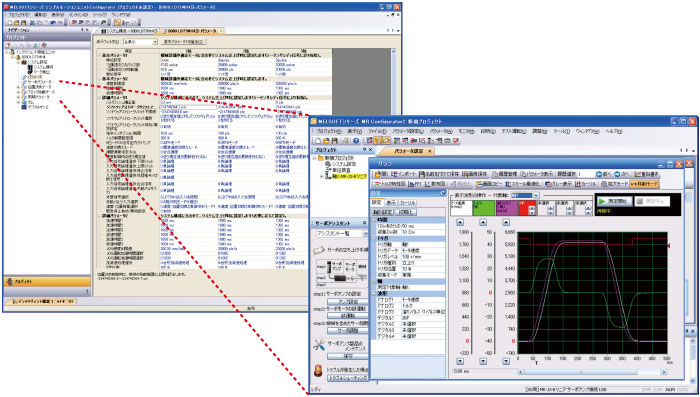
ㆍ서보 앰프 셋업
서보 앰프의 파라미터 설정 및 조정은 PLC 경유 셋업 소프트웨어 MR Configurator2에서 쉽게 실행할 수 있습니다.
| 심플 모션 유닛 | |||
|---|---|---|---|
| LD77MS16 | LD77MS4 | LD77MS2 | |
| 서보 앰프 접속 방식 | SSCNETⅢ/H (150Mbps) |
||
| 서보 앰프 간 최대 접속 거리[m] |
100 | ||
| 접속 서보 앰프 | MR-J4(W)-B |
||
| 최대 제어 축수 | 16축 | 4축 | 2축 |
| 연산 주기[ms] | 0.88 / 1.77 | 0.88~ | |
| 엔지니어링 환경 | 심플 모션 유닛 설정 도구 ※1 MR Configurator2 | ||
| 제어 방식 |
PTP(Point To Point) 제어, 위치 제어, 속도 제어、 토크 제어, 압력 제어, 캠 제어, 동기 제어, 2축/3축/4축 직선 보간, 2축 원호 보간, 궤적 제어, 속도ㆍ위치 전환 제어(ABS/INC), 위치ㆍ속도 전환 제어(INC) |
||
| 제어 단위 | mm, inch, degree, PLS | ||
| 위치결정 데이터수 | 600데이터(위치결정 데이터 No.1~600)/축 (MELSOFT GX Works2, 시퀀스 프로그램에서 설정 가능) |
||
| 가감속 방식 | 사다리꼴 가감속, S자 가감속 | ||
| 수동 제어 | JOG 운전, 수동 펄스 발생기 운전, 인칭 운전 | ||
| 제어 내용 변경 기능 |
현재값 변경, 목표 위치 변경 기능 |
||
| 원점복귀 방식 |
근점 도그식, 카운트식 1, 카운트식 2, 데이터 세트 방식, 스케일 원점 신호 검출식
|
||
| 보조 기능 |
비상 정지 기능, H/W 스트로크 리미트 기능, S/W 스트로크 리미트 기능, 절대 위치 시스템, 앰프 없음 운전 기능 , 무한 길이 이송 기능, 임의의 데이터 모니터 기능, 마크 검출 기능, 플래시 ROM 백업, 유닛 에러 이력 수집 기능, M코드 출력 기능, 디지털 오실로스코프 기능 , 캠 자동 생성 기능
|
||
| 입출력 점유 점수 | 32점(I/O 할당:인텔리전트 기능 유닛 32점) | ||
| DC5V 내부 소비 전류[A] | 0.70 | 0.55 | |
| 중량[kg] | 0.22 | ||
※1:심플 모션 유닛 설정 도구는 MELSOFT GX Works2에 포함되어 있습니다.