
사람 협조 용도를 위한 안전성 향상
안전 옵션에 의한 사람 협조 지원에 의해 사람과 로봇에 의한 작업 영역의 공용화를 가능하게 합니다.
따라서 생산성과 유연성을 겸비한 공장을 실현합니다.
(※ 고객의 리스크 평가가 필요합니다. )
안전 옵션
로봇을 멈추지 않고 작업 영역 내에 어프로치 가능
- 국제 규격의 요구에 적합한 높은 안전성
- 안전 입력 기능으로 로봇의 비상 정지를 발생시키지 않고 안전 문을 개방할 수 있습니다.
- 협조 작업 영역에 사람이 침입하지 않는 한, 로봇은 그 영역에 어프로치 하지는 않습니다. (동작 범위 제한 기능)
- 협조 작업 중에는 사람의 안전ㆍ안심을 담보하기 위해 안전한 속도를 유지한 상태에서 계속 동작합니다.
- 안전 문이 닫히면 협조 작업에서 단독 작업으로 자동 전환하여 공유 영역에 대한 어프로치를 재개합니다.
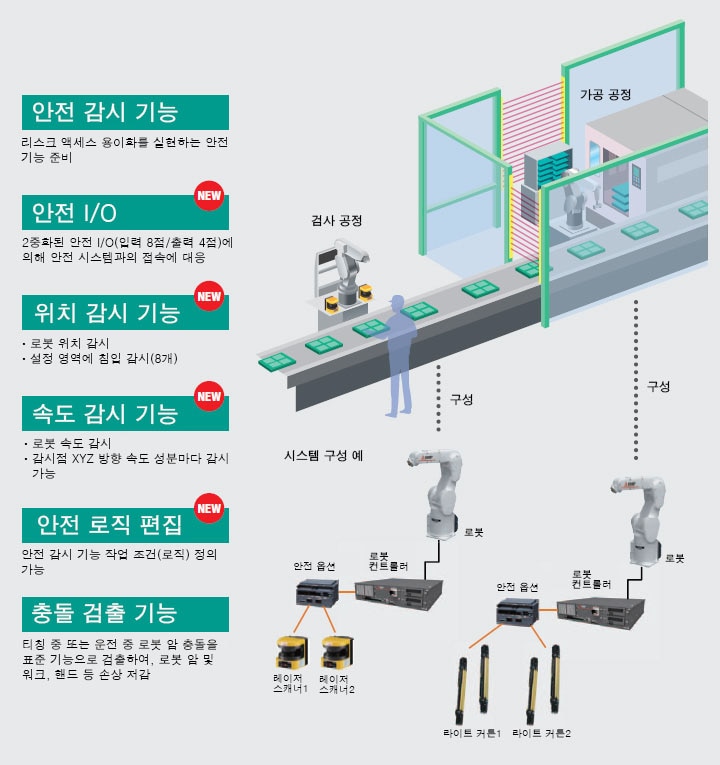
안전 감시 기능
리스크 평가의 용이화를 실현하는 국제 규격의 요구에 적합한 안전 기능을 준비하였습니다.
안전 I/O
이중화된 안전 I/O를 입력 8점/출력 4점으로 확장하였습니다. 다양한 안전 시스템의 구축이 가능합니다.
위치 감시 기능
- 로봇의 위치를 감시합니다.
- 설정 영역에 대한 침입을 8위치까지 감시합니다
속도 감시 기능
- 로봇의 속도를 감시합니다. 또한, 로봇의 암, 핸드상에 설정된 감시점이 감시 속도를 초과하지 않는지를 감시합니다.
- 감시점의 XYZ 방향 성분별로도 감시가 가능합니다. 시스템상, 동작하지 않는 방향의 감시 속도를 낮게 설정하면, 안전 거리를 작게 하여 안전하게 소형 셀을 실현할 수 있습니다.
안전 로직 편집
- 안전 로직 편집에 의해 안전 시스템의 구축ㆍ운용을 개선합니다.
- 로봇 컨트롤러 내에서 안전 감시 기능의 작동 조건(로직)을 정의하여 안전 CPU를 사용하지 않아도 안전 감시 조건의 설정이 가능합니다.
- 편집 화면에서 조건을 설정하면 안전 I/O와 위치 감시를 조합한 인터록 감시를 실현합니다.
위치 감시:로봇의 위치에 따라 지정된 기능을 작동
인터록 감시:다른 로봇의 위치에 따라 지정된 안전 기능을 작동
충돌 검출 기능(표준 기능)
- 티치 중 또는 운전 중 로봇 암의 충돌을 검출하여 로봇 본체 및 핸드의 손상을 줄입니다.
- 충돌 검출 기능을 사용하여 워크와 대상물과의 간섭에 의한 워크 손상을 억제할 수 있습니다.
- 검출 레벨을 보호 대상에 맞추어 변경할 수 있습니다.
- 충돌 검출 후의 동작을 상황에 따라 프로그래밍 할 수 있습니다.
(예:즉시 정지하여 에러 출력, 임시 저장 동작 후 에러 출력 등)