캘리브레이션 지원 기능
2D 비전 센서를 사용하여 주변 기기와의 위치 캘리브레이션을 지원합니다.
번거로운 티칭 작업을 자동화하고, 정밀도의 불균형을 저감할 수 있습니다.
캘리브레이션 지원 기능의 종류
| 명칭 |
용도 |
기능 개요 |
| 자동 캘리브레이션 |
로봇×2D 비전 센서 |
로봇 좌표와 센서 좌표의 여러 대응점을 교시하고, 로봇과 카메라 간의 위치 관계를 자동으로 산출합니다. |
| 워크 좌표 캘리브레이션 |
로봇×주변기기/지그 |
비전 센서를 사용하여 로봇 좌표와 주변 기기 그리고 지그 등의 로봇 외의 임의 좌표(워크 좌표)와의 캘리브레이션을 실행합니다. |
| 로봇 간 상대 캘리브레이션 |
로봇×로봇 |
공통의 워크 좌표를 여러 로봇으로 정의하여 로봇 간의 위치 관계를 구할 수 있습니다. |
구성도

비전 센서(MELSENSOR)
| 명칭 |
개요 |
| VS80 |
 |
콤팩트한 사이즈로 좁은 공간이나 손이 닿지 않는 장소에 설치하거나 로봇 핸드 등에 탑재할 수 있습니다. PoE 탑재의 배선 절약 단독 비전 센서입니다. |
| VS70 |
 |
풍부한 옵션 제품으로 조명·렌즈·필터 등 자유롭게 선택할 수 있으며, 고객의 용도에 맞춰 유연하게 변경할 수 있습니다. |
자동 캘리브레이션
비전 센서의 좌표를 자동으로 보정하여 위치 정밀도를 향상시킵니다. ◆로봇×2D 비전 센서◆
간단한 셋업
- 자동으로 좌표의 캘리브레이션이 가능. 간단한 기동을 실현합니다.
- 티칭 작업을 자동화하여 간단한 셋업이 가능합니다.
- 자동 캘리브레이션 조건 설정 화면에서 카메라 설치 방식이나 시야의 크기, 해상도 등의 설정 가능.
자동으로 교시점을 생성하여 자동 캘리브레이션이 가능합니다.
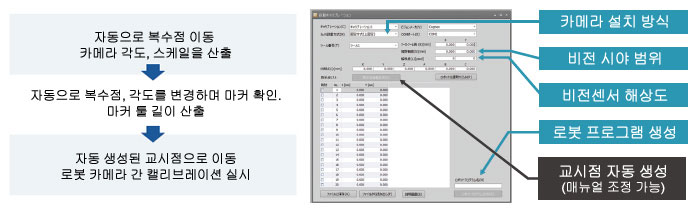
정밀도 향상
- 로봇에 의한 자동 캘리브레이션에 따라 동작 조건이 안정되고 정밀도의 불균형이 줄어들어 정밀도를 향상시킬 수 있습니다.
3개의 카메라 설치 방식에 대응

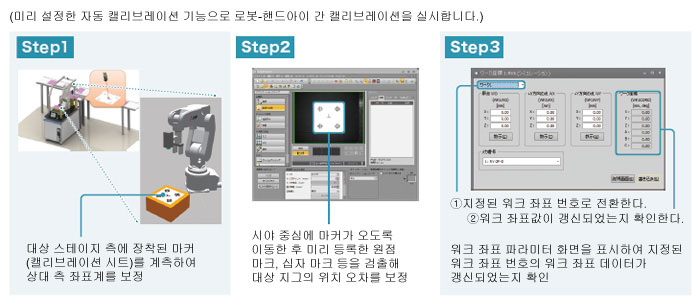
워크 좌표 캘리브레이션
비전 센서로 로봇 좌표와 워크 좌표의 보정을 하여 위치 정밀도를 향상시킵니다. ◆로봇×주변기기/지그◆
티칭 작업의 번거로움 해소
- 워크 좌표의 티칭 작업 자동화.
- 로봇과 주변기기와의 캘리브레이션이 간단하여 작업 시간과 작업의 번거로움을 줄일 수 있습니다.
워크 좌표와 로봇의 위치 관계가 변화하는 환경에서도 조정이 가능
- 워크 좌표와 로봇의 위치 관계가 변화하는 환경에서도 자동으로 캘리브레이션이 가능합니다.
- 무인 반송차나 대차에 탑재된 로봇과 작업 팔레트의 캘리브레이션이 쉬워집니다.

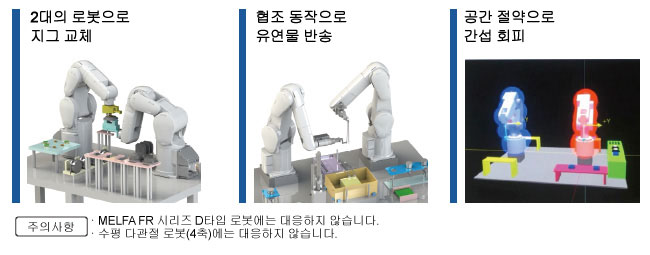
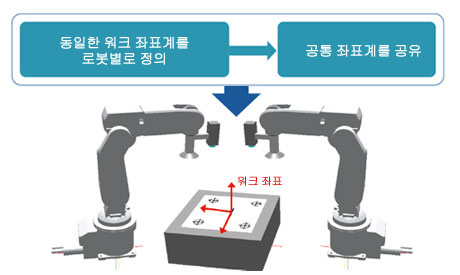
로봇 간 상대 캘리브레이션
비전 센서로 로봇 여러 대 간의 위치를 보정. 협조 동작의 위치 정밀도를 향상시킵니다. ◆로봇×로봇◆
정밀도 향상, 기동 공수 감소
- 번거로운 티칭 작업 자동화. 쉽게 간섭 회피나 협조 작업이 가능합니다.
- 간섭 회피나 협조 동작 시의 정밀도 향상, 기동 공수의 절감을 도모할 수 있습니다.
- 같은 워크의 좌표를 여러 로봇으로 공유하기 위한 캘리브레이션 자동화가 가능합니다.
- 작업자에 의한 정밀도의 불균형이나 작업자의 작업 부담을 경감할 수 있습니다.
사용 예시