![]()
위치결정 모듈에는 트랜지스터 출력 타입과 차동 드라이버 출력 타입의 2종류가 있으며, 접속하는 드라이브 모듈에 따라 선택하여 사용합니다. 차동 드라이버 출력 타입의 경우, 최대 5Mpulse/s의 고속 펄스 출력 및 최대 10m의 장거리 접속이 가능합니다.
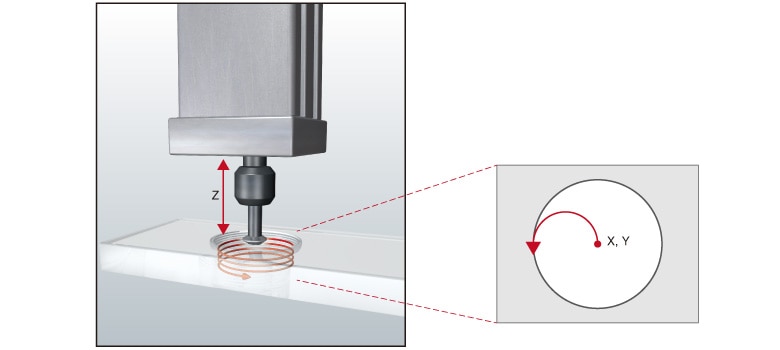
이러한 위치결정 모듈은 위치 제어 및 속도 제어를 실행할 수 있습니다. 또한, 기존의 직선 보간 기능, 원호 보간 기능에 추가하여 새로 헬리컬 보간 기능도 탑재하고 있으며, 밀링 머신 가공 등의 복잡한 제어를 필요로 하는 용도로 활약합니다.
위치결정 모듈은 엔지니어링 소프트웨어에 의해 설정된 "위치결정 데이터"를 사용하여 위치 제어 및 속도 제어 등을 실행합니다. 이 위치 제어 및 속도 제어에 "조건 판정"을 추가하여 실행하거나 지정된 위치결정 데이터를 반복하여 실행하는 등 어드밴스드 위치결정 제어 기능도 탑재하고 있습니다.
예를 들어, 자동차용 문의 실링 공정에서는 문의 밀봉 부분에 실링제를 도포하기 위하여 고정밀의 위치결정 제어가 요구됩니다. 이에는 직선이나 원호로 정확한 궤적을 그리는 고정밀의 보간 제어가 필요합니다.
위치결정 모듈에는 일반 기동 외에 고속 기동, 여러 축 동시 기동 등 여러 기동 방식이 있습니다.
고속 기동은 직후에 실행하는 위치결정 데이터를 미리 분석해 둠으로써, 데이터 분석 시간의 영향을 받지 않고 고속 기동하는 방식입니다. 여러 축 동시 기동은 지정된 동시 기동 대상축을 기동한 축과 같은 타이밍에 펄스 출력을 시작합니다. 또한, 한번의 기동으로 여러 위치결정 데이터군에 따라 차례로 운전하는 블록 기동도 실행 가능합니다. 같은 궤적을 몇번이고 반복하는 제어에 사용할 수 있습니다.
큰 구멍을 뚫는 볼링 용도에서는 X, Y, Z의 3축에서 각 보간 특성을 고려할 필요가 있습니다. 밀링 머신 가공에 의해 필요로 하는 크기의 구멍을 XY축 방향으로 원호상에 엽니다. 동시에 구멍의 깊이는 Z축에 따라 절출 위치의 편차를 최소한으로 두면서 세심한 주의를 기울여 가공합니다. 이러한 제어를 전용 NC 제어 시스템 없이 실행하는 경우, X, Y, Z의 3축간 보간 제어에 오차가 생기기 쉬우므로 고정밀의 위치결정 제어가 요구됩니다. 이 위치결정 모듈의 헬리컬 보간 기능을 사용하면, 난이도 높은 제어도 저렴한 비용으로 실현할 수 있습니다.
위치결정 모듈 성능 사양
| 항목 | 트랜지스터 출력 | 차동 드라이버 출력 | ||
|---|---|---|---|---|
| RD75P2 | RD75P4 | RD75D2 | RD75D4 | |
| 제어 축수 [축] | 2 | 4 | 2 | 4 |
| 제어 단위 | mm, inch, degree, pulse | mm, inch, degree, pulse | mm, inch, degree, pulse | mm, inch, degree, pulse |
| 위치결정 데이터 [데이터/축] | 600 | 600 | 600 | 600 |
| 모듈 백업 기능 | 위치결정 데이터, 블록 기동 데이터를 플래시 ROM에 저장(배터리 없음) | |||
| 기동 시간(1축 직선 제어)[ms] | 0.3 | 0.3 | 0.3 | 0.3 |
| 최대 출력 펄스 [pulse/s] | 200,000 | 200,000 | 5,000,000 | 5,000,000 |
| 서보 간의 최대 접속 거리 [m] | 2 | 2 | 10 | 10 |
| 보간 기능 | ||||
| 직선 보간 [축] | 2 | 2, 3, 4 | 2 | 2, 3, 4 |
| 원호 보간 [축] | 2 | 2 | 2 | 2 |
| 헬리컬 보간 [축] | ― | 3 | ― | 3 |
| 제어 방식 | ||||
| PTP(Point To Point) 제어 | ● | ● | ● | ● |
| 궤적 제어(직선, 원호, 헬리컬) | ● | ● | ● | ● |
| 속도 제어 | ● | ● | ● | ● |
| 속도ㆍ위치 전환 제어 | ● | ● | ● | ● |
| 위치ㆍ속도 전환 제어 | ● | ● | ● | ● |
| 가감속 처리 | ||||
| 사다리꼴 가감속 | ● | ● | ● | ● |
| S자 가감속 | ● | ● | ● | ● |
| 고속 기동 기능 | ||||
| 위치결정 기동 신호에 의한 기동 [μs] | 8 | 8 | 8 | 8 |
| 외부 지령 신호에 의한 기동 [μs] | 20 | 20 | 20 | 20 |
| 외부 배선 접속 방식 | ||||
| 40핀 커넥터 | ● | ● (×2) | ● (×2) | ● (×2) |