![]()
모션 제어기용 본체 O S소프트웨어
엔지니어링을 지원하는 3개의 패키지
 |
 |
 |
||||
|
|
|
||||
전용 언어 직선 보간(1~4축), 원호 보간, 등속 제어, 치수 이송, 속도 전환 제어, 속도 제어, 속도 위치 전환 |
기계 지원 언어 동기 제어, 전자 샤프트, 전자 클러치, 전자 캠, 드로 제어 |
EIA 언어(G코드) 직선 보간(1~4축), 원호 보간, 헬리컬 보간, 등속 위치결정 |
||||
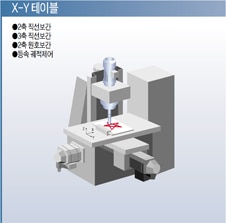
 1~4축의 직선 보간, 2축 원호 보간, 등속 제어, 속도 제어 등을 제어할 수 있으며, 반송기, 조립기 등의 용도에 적합합니다.
1~4축의 직선 보간, 2축 원호 보간, 등속 제어, 속도 제어 등을 제어할 수 있으며, 반송기, 조립기 등의 용도에 적합합니다. 여러 서보 모터의 동기 제어 및 소프트웨어에 의한 캠 제어를 실행할 수 있으며, 자동기 등의 용도에 적합합니다.
여러 서보 모터의 동기 제어 및 소프트웨어에 의한 캠 제어를 실행할 수 있으며, 자동기 등의 용도에 적합합니다. 1~4축의 직선 보간, 2축 원호 보간, 등속 제어 등의 제어를 EIA 언어(G코드)로 실행할 수 있으며, 공작기 주변 등의 용도에 적합합니다.
1~4축의 직선 보간, 2축 원호 보간, 등속 제어 등의 제어를 EIA 언어(G코드)로 실행할 수 있으며, 공작기 주변 등의 용도에 적합합니다.반송 조립에 최적의 소프트웨어 패키지입니다.
 |
 |
 |
||
 |
 |
 |
||
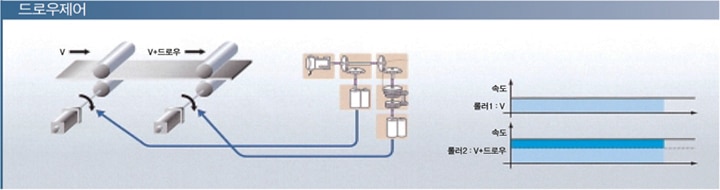
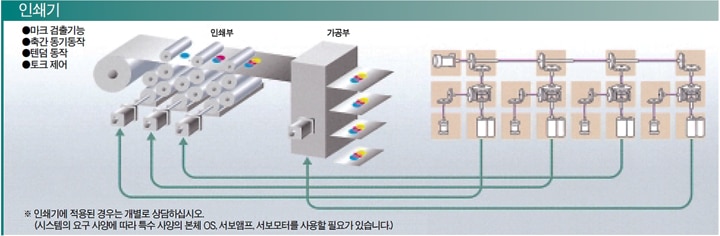
위치 루프를 포함하지 않는 토크 제어를 실행할 수 있습니다. 풀기축, 감기 축 등의 장력 제어 용도에도 사용할 수 있습니다. |
[특허 신청 중]
|
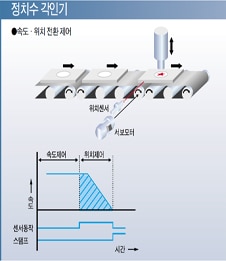
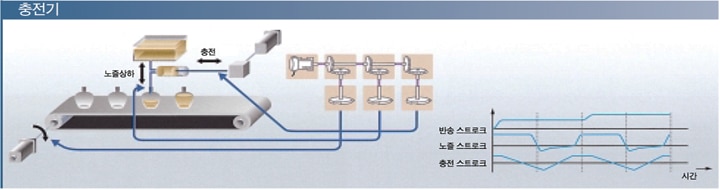
서보 모터를 지정 속도로 회전시켜 정위치 정지 명령이 ON 된 후에 지정 위치에 정지시킬 수 있습니다. 운전 중 속도 변경은 물론 가감속 시간도 임의의 값으로 변경할 수 있습니다. 용도 예:스피너 |
프로젝트와 본체 OS 소프트웨어, MELSOFT MT Works2에 소프트웨어 보안 키를 설정하여 프로젝트를 조작하는 PC 및 모션 CPU를 한정함으로써 사용자 데이터를 보호합니다.
|
시스템 설정에서 데이터 종류 및 모니터 데이터 저장 디바이스를 설정하면, 실효 부하율, 회생 부하율, 모선 전압 등의 데이터를 모니터할 수 있습니다. |
위치결정 중에 목표 위치를 변경합니다. 비전 센서 등에서 위치를 보정하는 경우, 다시 위치결정을 기동하지 않고 최종 위치에 대한 위치결정이 가능합니다. |
위치 루프 또는 속도 루프에 의한 2종류의 속도 제어를 실행할 수 있습니다. |
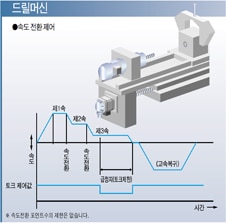
등속 제어 중 다음 포인트에 대한 위치결정 시작을 일반 위치결정 시작보다 고속으로 실행할 수 있습니다. |
입력 유닛에서의 신호를 트리거로 하여 이송 현재값, 편차 카운터값 등 16종류의 데이터 중에서 최대 11데이터를 동시에 지정 디바이스에서 읽을 수 있습니다.
|
위치결정 제어에서 공통 설정 항목을 파라미터 블록으로 최대 64종류 설정하여 자유롭게 선택할 수 있습니다. |
운전 중 실제 현재값, 모터 전류, 워드 디바이스 데이터 등에 대응한 최대 32점의 ON/OFF 출력 신호를 모션 SFC 프로그램에 관계없이 고속으로 출력할 수 있습니다.
|
한번의 기동을 실행하면 위치결정 포인트의 설정값을 실시간으로 검출하여 변경되는 설정값에 추종하여 위치결정 제어를 실행합니다. |
임의 비율의 S자 곡선에 의해 가감속 특성을 설정할 수 있습니다. |
가속도가 매끄럽게 변경되는 가감속 처리를 실행함으로써, 누적 펄스의 변동을 억제하여 튜닝 시간의 단축을 도모할 수 있습니다. |
위치결정, JOG 운전 중 토크 제한값 변경을 모션 전용 명령 CHGT로 쉽게 실행할 수 있습니다
|
MELSOFT MT Works2의 테스트 모드에서 위치결정 포인트를 티칭에 의해 설정할 수 있습니다.
|
위치결정 운전 중에 각 위치결정 포인트에서 0~32767까지의 M코드를 출력할 수 있습니다.
|
위치결정, JOG 운전 중 속도 변경 및 도중 정지/재기동을 모션 전용 명령 CHGV로 쉽게 실행할 수 있습니다.
|
원점 어드레스 등의 원점복귀 데이터의 일부를 모션 CPU의 워드 디바이스로 간접 설정할 수 있습니다.
|
0~5000ms의 범위 내에서 자유롭게 드웰 타임을 설정할 수 있습니다. |
게인 전환 지령을 ON/OFF 하면, 모션 컨트롤러에서 서보 앰프의 게인을 전환할 수 있습니다. |
Corner mark ON 시 위치를 고정밀도에 검출하여 래치할 수 있습니다. 포장기의 Corner mark의 검출, 각종 센서 ON 시 위치 데이터의 래치에 사용할 수 있습니다. |
||
자동기에 최적의 소프트웨어 패키지입니다.
![]()
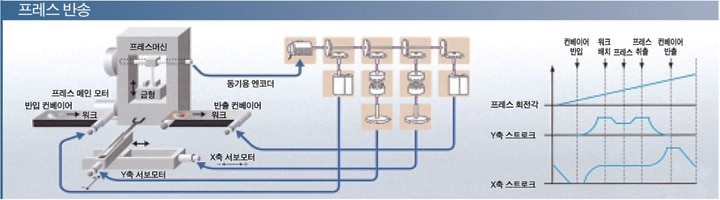
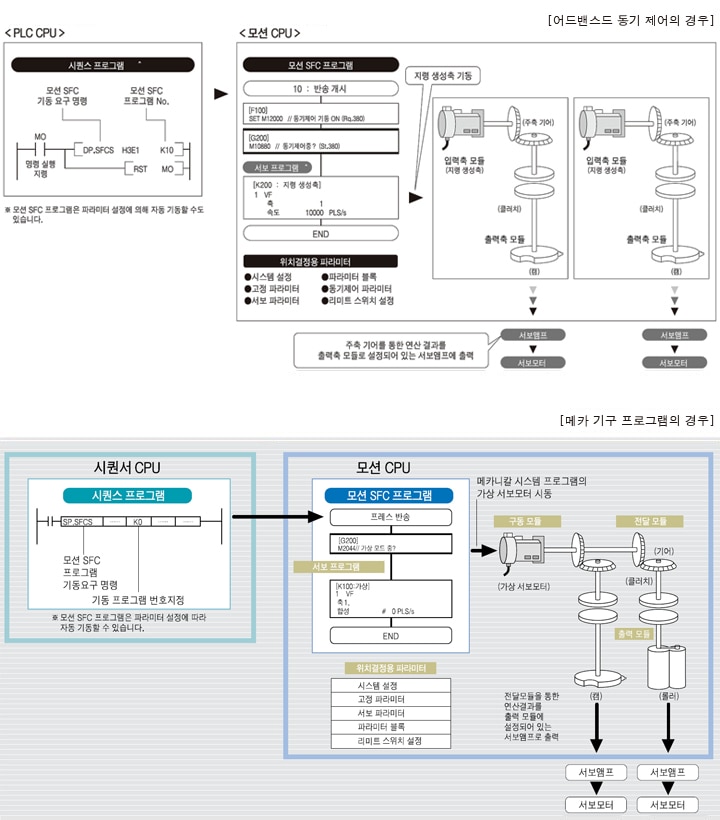
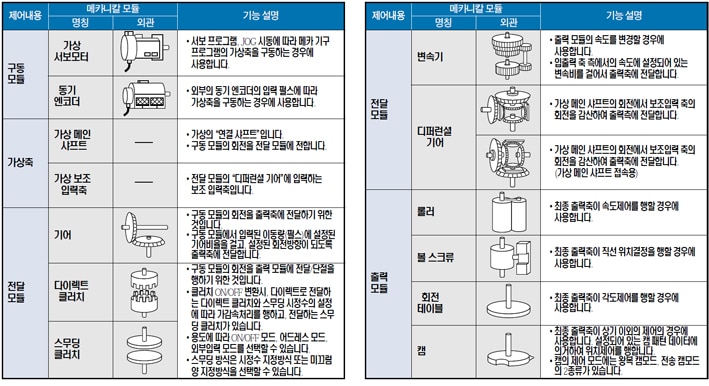
기어, 샤프트, 변속기, 캠 등의 기계 장치를 소프트웨어로 대체한 동기 제어입니다. 축마다 동기 제어를 기동, 정지할 수 있습니다. 또한, 동기 제어의 축과 위치결정 제어의 축은 혼재가 가능합니다. |
가속도가 매끄럽게 변경되는 가감속 처리를 실행하면, 누적 펄스의 변동을 억제하여 튜닝 시간의 단축을 도모할 수 있습니다. |
동기 엔코더에 추종하는 서보 모터축단의 위상 지연을 보정할 수 있습니다. 또한, 2축 이상의 동기 제어시, 각 서보 모터축단의 위상차를 보정하는 것도 가능합니다.
|
위치 루프를 포함하지 않는 토크 제어를 실행할 수 있습니다. 풀기축, 감기 축 등의 장력 제어 용도에도 사용할 수 있습니다. |
[특허 신청 중] |
프로젝트와 본체 OS 소프트웨어, MELSOFT MT Works2에 소프트웨어 보안 키를 설정하여 프로젝트를 조작하는 PC 및 모션 CPU를 한정함으로써 사용자 데이터를 보호합니다.
|
위치결정 중에 목표 위치를 변경합니다. 비전 센서 등에서 위치를 보정하는 경우, 다시 위치결정을 기동하지 않고 최종 위치에 대한 위치결정이 가능합니다. |
Corner mark ON 시 위치를 고정밀도로 검출하여 래치할 수 있습니다. 포장기의 Corner mark의 검출, 각종 센서 ON 시 위치 데이터의 래치에 사용할 수 있습니다. |
|
![]()
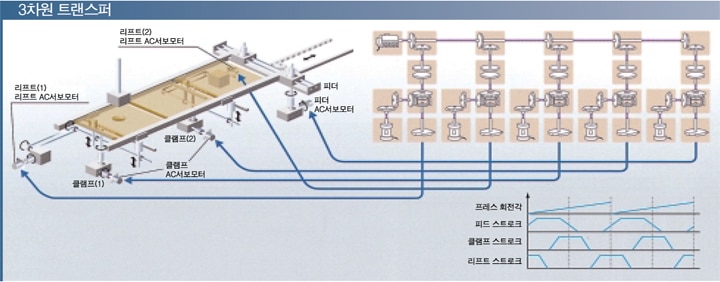
다양한 소프트웨어 기계 유닛, 캠 패턴 유닛을 자유롭게 조합하면, 복잡한 동기 제어, 강조 제어를 쉽게, 또한, 저렴한 비용으로 실현할 수 있습니다.
동기 제어에는 어드밴스드 동기 제어와 기계 장치 프로그램을 사용하는 2개의 방식이 있으며, 어느 하나를 선택할 수 있습니다.
(어드밴스드 동기 제어는 Q17nDSCPU만 대응)
![]()
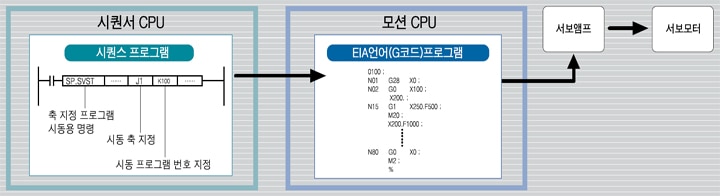
EIA 언어(G코드)에 의해 다양한 모션 제어가 가능합니다. |
![]()
![]()
시스템 설정에서 데이터 종류 및 모니터 데이터 저장 디바이스를 설정하면, 실효 부하율, 회생 부하율, 모선 전압 등의 데이터를 모니터할 수 있습니다. |
운전 중 실제 현재값, 모터 전류, 워드 디바이스 데이터 등에 대응한 최대 32점의 ON/OFF 출력 신호를 고속으로 출력할 수 있습니다. |
입력 유닛에서의 신호를 트리거로 하여 이송 현재값, 편차 카운터값 등 8종류의 데이터 중에서 최대 11데이터를 동시에 지정 디바이스에서 읽을 수 있습니다. |
위치결정 제어에서 공통 설정 항목을 파라미터 블록으로 최대 64종류 설정하여 자유롭게 선택할 수 있습니다. |
위치결정 운전 중에 각 위치결정 포인트에서 0~9999까지의 M코드를 출력할 수 있습니다. |
0.001~65.535s의 범위 내에서 자유롭게 드웰 타임을 설정할 수 있습니다. |
가감속 방식을 시간 일정 가감속 또는 가속도 일정 가감속 중에서 선택할 수 있습니다. |
실행 중인 프로그램의 처리를 강제로 중단하고 다른 프로그램으로 전환하는 처리를 실행할 수 있습니다. |
이동 명령을 실행하기 위하여 축을 지정하여 기동하는 "축 지정 프로그램"과 이동 명령 이외의 제어문을 실행하기 위하여 축을 지정하지 않고 기동하는 "제어 프로그램"의 2종류의 모션 프로그램을 실행할 수 있습니다. |
원점 어드레스 등의 원점복귀 데이터의 일부를 모션 CPU의 워드 디바이스로 간접 설정할 수 있습니다. |
게인 전환 지령을 ON/OFF 하면, 모션 컨트롤러에서 서보 앰프의 게인을 전환할 수 있습니다. |
임의 비율의 S자 곡선에 의해 가감속 특성을 설정할 수 있습니다. |