e-F@ctory
도입사례
 도입사례
도입사례
미쓰비시전기 FA제품 및 솔루션의 실제 도입사례를 소개합니다.


다품종 소량 생산에 대한 대응은 업계를 불문하고 제조업 전체에 공통되는 과제입니다만, 생산하는 제품에 따라서는 다품종 대량 생산이 필요한 경우도 있습니다. 미쓰비시전기에서 전자 개폐기의 제조를 담당하는 나고야 제작소 카니공장에서는 신제품 「MS-T 시리즈」의 생산시작에 수반하여 셀 생산에 로봇을 조합한 생산 방식을 도입하였습니다. 셀에 의한 유연한 생산과 로봇에 의한 대량 생산을 접목시킴으로써, 전자 개폐기에 요구 되는 다품종 대량 생산을 실현하고 있습니다.
사례의 포인트
- 1.셀 생산에 의한 유연한 변종ㆍ변량 생산
- 2.로봇을 활용한 품질 향상과 高가동률 실현
- 3.미쓰비시 FA 통합 솔루션에 의한 생산 최적화
전자 개폐기의 제조 거점, 나고야 제작소 카니공장

미쓰비시전기 나고야 제작소 카니공장은 모터 부하 등의 기동ㆍ정지 및 과부하 보호(소손 보호)의 용도로 사용되는 전자 개폐기 전문 생산 공장입니다. 전자 개폐기는 대량 생산이 필요한 제품으로, 대량 생산을 가능하게 하기 위해서 전자동 생산 라인이 투입되고 있습니다. 그러나 전자동 라인은 같은 제품을 계속해서 생산함으로써 생산성이 향상되는 반면, 설정을 변경하는데 많은 시간이 소요되기 때문에 다품종 제품을 생산하는 경우에는 생산 효율이 낮아지는 약점이 있습니다. 전자 개폐기는 코일의 종류 등에 따라 품종이 다양하기 때문에, 납기에 맞추어 생산 품종을 수시로 전환하는 등 유연한 생산 방식이 요구되어 왔습니다.
적은 작업 변경으로 다품종 생산을 실현하는 방법의 하나는 작업자에 의한 셀 생산 방식을 적용하는 것입니다. 그러나 전자 개폐기(특히 저압 제품)는 고객의 발주량이 많아 작업자에 의한 셀 생산으로는 충분한 생산량을 확보할 수 없습니다. 따라서, 작업 변경을 반복해도 전자동 생산 라인과 차이가 나지 않는 생산 능력을 보유한 설비가 절실하였습니다.
MS-T 시리즈에서 도입한 「로봇 셀 생산 시스템」

전자 개폐기 「MS-T 시리즈」
이에따라, 2012년 가을부터 생산을 시작한 신제품 「MS-T 시리즈」에서는 셀 생산에 로봇을 조합한 「로봇 셀 생산 시스템」을 도입하게 되었습니다.
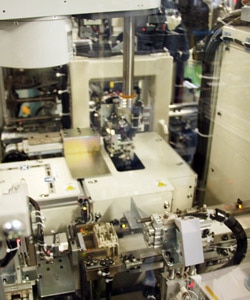
로봇에 의한 셀 생산의 포인트는 작업자와 설비의 융합을 도모하고, 부품의 반송이나 조립 부분에 로봇을 사용하여 자동화하였다는 점에 있습니다. 전자 개폐기의 생산은 크게 나누어 가동 접촉자 삽입, 고정 접촉자 삽입, 리어 케이스 조립, 단자 나사 조임, 단자 커버 삽입, 시험 등 6가지 공정으로 완성되며, 각 공정에 로봇과 각종 FA 기기가 사용되고 있습니다
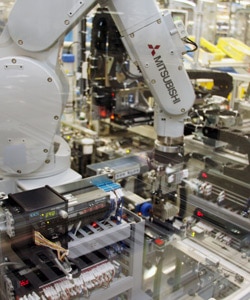
「산업용 로봇 MELFA F 시리즈 채택」

로봇 셀에 사용하는 산업용 로봇 「MELFA F 시리즈」
이 생산 시스템에는 산업용 로봇 「MELFA」의 최신 기종인 「MELFA F 시리즈」가 적용되었습니다. 이 제품은 고속성은 물론, 가동 범위 확대, 케이블 내장 등 성능을 강화하고, 역각 센서와 비전 센서를 활용하는 등 지능화 기술을 향상시킨 것이 특징입니다
로봇 셀에서는 자동으로 빠르게 조립 작업할 수 있도록 하고, 조립 정밀도를 높일 수 있도록 하는 다양한 연구 개발 활동이 전개되었습니다. 예를 들면, 가동 접촉자 삽입 공정에서는 비전 센서를 사용하여 접점 위치의 차이를 검증하거나 케이스 조립 시 로봇 핸드에 부착된 역각 센서로 하중을 계측하여 조립에 이상이 없는지를 검출하고, 단자 나사 조임 공정에서는 토크 센서를 사용하여 오류 징후를 보이면 일단 나사를 풀고 나서 다시 조이는 등 문제를 해결하고 있습니다. 부품 이송 장치를 사용하여 부품을 공급하고 있는 공정에서는 부품이 출구에서 막혀 기기가 정지하는 트러블을 해결하기 위해, 비전 센서에서 부품의 위치 및 각도를 인식하여 로봇이 이에 따라 동작을 하는 구조를 채택하고 있습니다.
카니공장에 로봇은 기존에도 사용되고 있었지만, F 시리즈는 로봇의 5축 부분까지 케이블이 내장됨으로써, 핸드 케이블의 뒤틀림 및 단선 위험이 줄어 메인터넌스 부담이 절감되었습니다. 또한, 이는 주변의 간섭을 줄이는데도 큰 효과가 있습니다
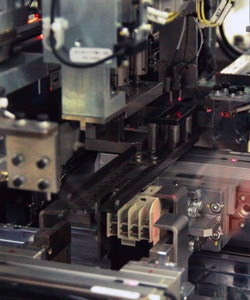
가동 접촉자 삽입 공정. 로봇의 앞에 있는 센서에서 삽입시의 이상 검출

고정 접촉자 삽입 공정에서는 비전 센서에서 부품의 위치 및 각도를 인식하여 로봇의 추출 위치를 보정
리어 케이스 조립 공정.
로봇의 앞에 있는 역각 센서의 하중으로
조립 이상을 검출
단자 나사 조임 공정에서는 서보 시스템에 의해
나사에 걸리는 부하를 토크 센서로 검출하여,
이상이 발견된 경우 재조립 등의 제어를 실행
준비중입니다.
3월 30일 오픈!
