업종별 솔루션전기·전자 분야

메모리 카드
조립
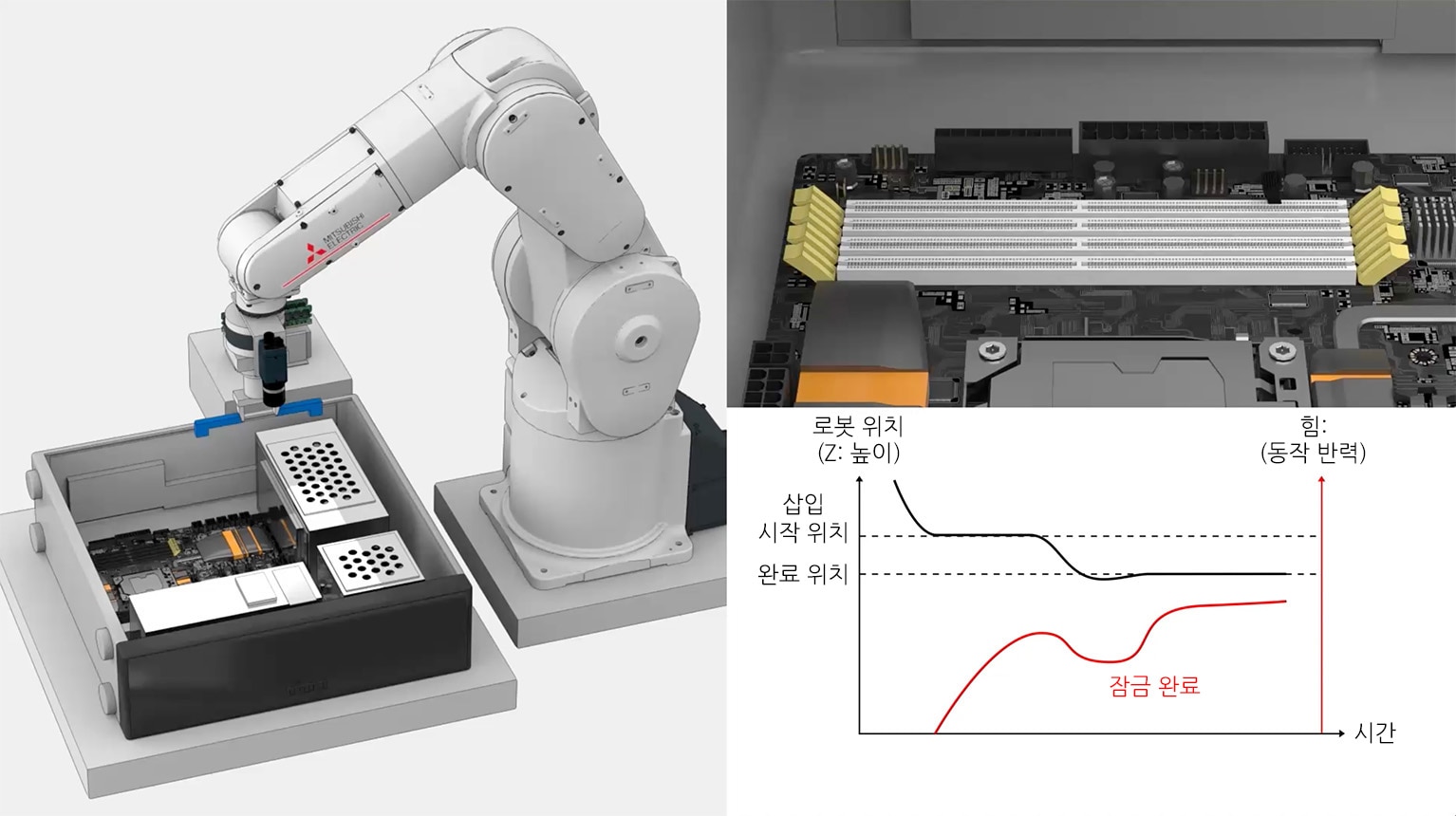
1대의 로봇으로 메모리 카드를 꺼내고, 삽입. 역각 센서를 사용하여 압력을 감지하고, 이상/조립 완료를 검지.
메모리 카드 조립 예

과제와 해결책

과제
부품 가공 정밀도(치수)의 편차나 상류 공정에서의 조립 정밀도 편차에 영향을 받지 않는 자동화 요구 증가. 부품을 보호하면서 정밀한 조립이 필요한 경우, 조립 시 일정 시간 동안 일정한 힘으로 압착해야 하는 경우가 있으며, 또한 그 기록을 남겨야 하는 경우도 있음.

해결책
- 로봇이 메모리 부품을 꺼냄
- 비전 센서를 사용하여 워크 오차를 인식
- 로봇 내에서 벡터 연산 기법으로 작업 위치를 계산하고, 보정된 위치로 메모리 부품을 접근시킴
- 기판 측 슬롯에 메모리 부품 삽입(모방 제어). 그 동안 역각 센서로 이상 유무 및 조립 완료 검지
Point
- 【부품·제품 손실 감소】
- 부품 조립 중 워크의 손상 등을 역각 센서로 검지하여 방지
- 【트레이서빌리티 관리】
- 조립 시의 역각 데이터를 실시간으로 수집하여 데이터를 품질 관리에 활용 가능
- 【위치 오차를 자동으로 보정】
- 워크의 가공 정밀도나 설치 위치 편차를 역각 센서나 비전 센서로 보정하여 설비의 안정적 가동에 기여
워크의 방향에 따른 이상 발생 시
워크가 앞뒤 반대로 배치된 상황. 삽입 동작 시 역각 센서로 압력 이상을 검지. 워크 파손 전에 동작을 정지.











