업종별 솔루션전기·전자 분야

정밀 나사 체결
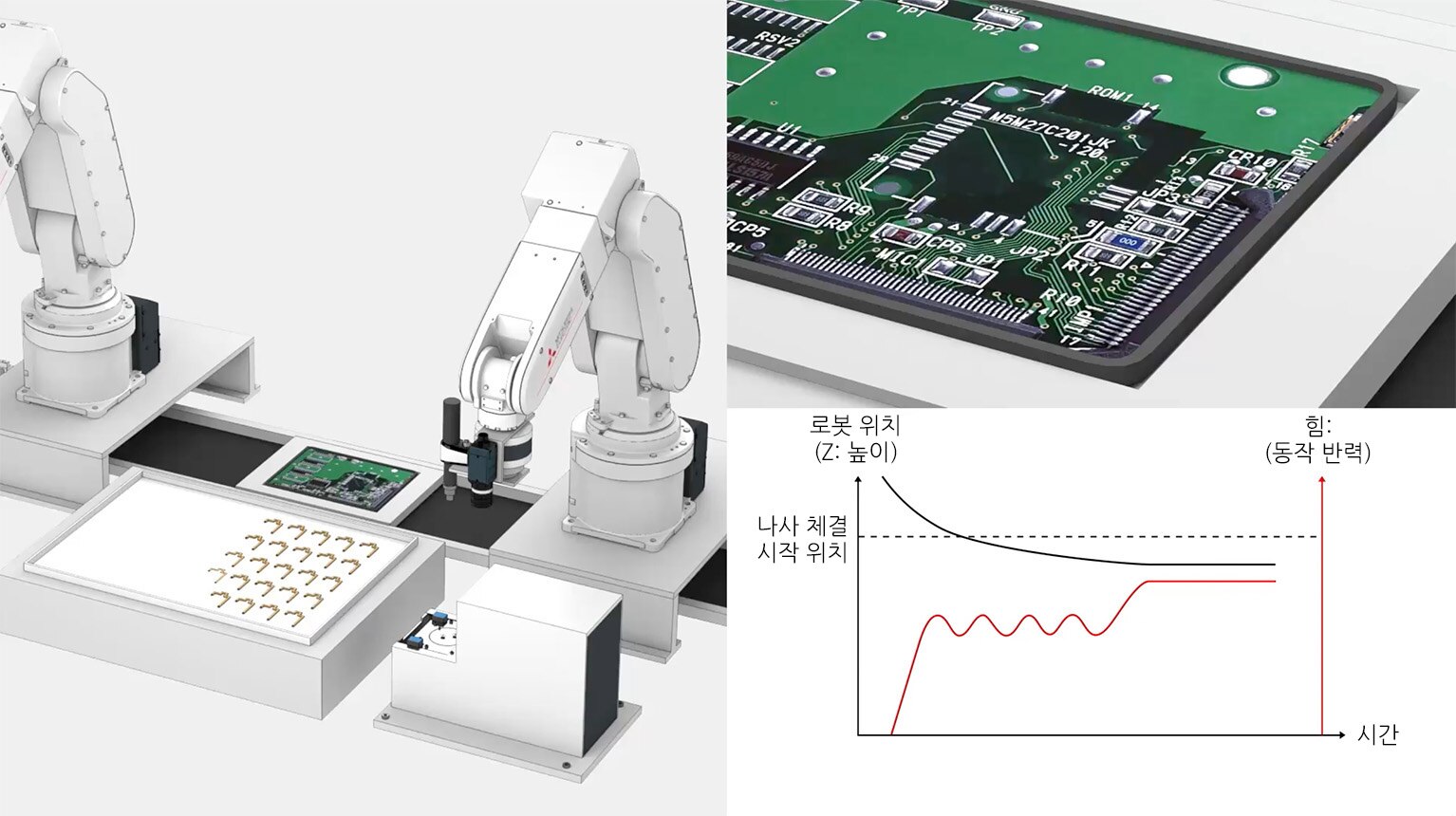
2대의 로봇이 협동하여 유연한 워크(FPC/플렉시블 기판)를 반송하고, 나사 체결. 역각 센서를 사용하여 위치 오차/이상 검지, 워크 파손 방지.
정밀 나사 체결 예

과제와 해결책

과제
전기 전자 업계의 제조 공정에서 흔히 볼 수 있는 나사 체결 공정에서 보다 유연성이 높은 로봇을 활용한 나사 체결 공정이 증가 추세. 로봇 여러 대를 이용한 복잡한 동작에서도 자동화 검토가 진전됨.

해결책
- 2대의 로봇이 협동하여 FPC(플렉시블 기판)를 반송
- 로봇이 나사 공급기에서 나사를 꺼냄
- 비전 센서를 사용하여 워크 위치를 확인
- 로봇 내에서 벡터 연산 기법으로 작업 위치를 계산하고, 보정된 위치로 드라이버 선단을 접근시킴
- 역각 센서로 나사의 위치 오차 유무 검출 및 나사 체결 압력을 제어
- 핸드 끝에 탑재한 전동 드라이버로 나사 체결 실시
- 상기 전체 과정을 통해 여러 대의 로봇 간 및 주변 장치와의 간섭을 자동으로 회피
Point
- 【드래그 방지】
- 경량 워크의 위치를 유지하면서 나사 체결 실시
- 【경사 방향에도 대응】
- 6축 로봇의 자유도로 다양한 각도에서의 나사 체결 대응
- 【나사 하강 중 동기 동작】
- 나사 체결 동작 중에도 역각 제어를 활용하여 일정한 압착력 유지
- 【유연물 반송】
- 여러 대의 로봇에 의한 경량·유연한 워크(FPC 등)의 반송 및 위치 결정
- 【간섭 회피】
- 실시간 감시를 통해 프로그램 없이 간섭 회피 실현
- 【정밀 제품/나사 홀 보호】
- 역각 센서로 이상을 검지하여 동작 정지, 제품 파손 방지
위치 오차로 인한 이상 발생 시
불량 워크로 인해 홀 위치 오차 발생.
부적절한 위치에서의 나사 체결을 역각 센서로 이상 검지·제품 보호











