![]()
MELSERVO-J4 시리즈 서보 앰프

업계를 리드하는 기본 성능
업계 최고 레벨의 서보 앰프 기본 성능 
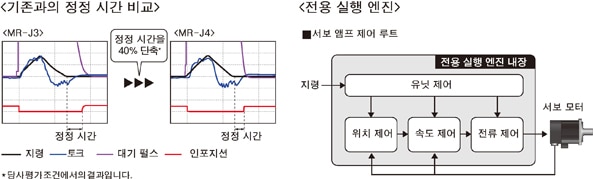
기존의 2 자유도형 모델 적응 제어를 더욱 진화시킨 고유의 고속 서보 제어 아키텍처를 집적한 전용 실행 엔진을 채택하였습니다. 2.5KHz의 속도 주파수 응답을 실현하였습니다. 또한, 독자 개발한 고분해능 절대 위치 엔코더(4, 194, 304 pulses/rev)의 채택으로 고속 고정밀 운전 가능 하이 엔드 머신의 퍼포먼스를 최대한으로 끌어냅니다.
고성능 서보 모터에 의한 기계 성능 향상
회전형 서보 모터는 엔코더의 고분해능화와 처리 속도 향상에 의해 더욱 고정밀의 위치결정과 부드러운 회전이 가능합니다.

선진 서보 게인 조정 기능
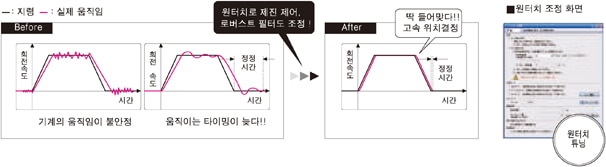
원터치 조정 
원터치 튜닝 기능을 ON 하기만 하면, 기계 공진 억제 필터, 어드밴스드 제진 제어Ⅱ*1, 로버스트 필터를 포함한 서보 게인 조정이 완료됩니다. 선진의 진동 억제 기능을 이용하여 장치의 성능을 극대화합니다. 실시간 오토 튜닝에서는 필요한 응답성의 설정도 자동으로 실행합니다. 또한, 서보 앰프 내부에서 지령을 생성하는 방식을 추가하였습니다. *2
*1. 1개의 주파수를 자동 조정합니다.
*2. MR-J4-B/MR-J4W_-B/MR-J4-A에서 대응합니다.
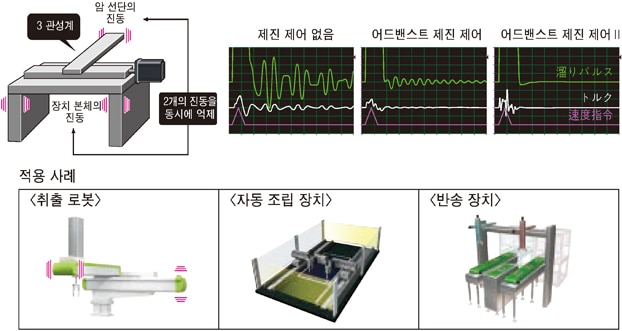
어드밴스드 제진 제어Ⅱ 
3 관성계의 기계에 대응하는 진동 억제 알고리즘에 의해 저주파 진동을 2개 동시에 억제 가능합니다. 조정도 MR Configurator2에서 쉽게 실행할 수 있습니다.
암 선단이나 장치 본체에서 발생하는 약 100Hz 이하의 비교적 낮은 주파수의 잔류 진동의 억제에 효과를 발휘합니다. 잔류 진동의 억제에 의해 튜닝 시간을 줄일 수 있습니다.
로버스트 필터
인쇄기, 포장기 등 벨트 및 기어로 구동하는 대관성 장치에서 기존 제어에서는 어려웠던 고응답과 안정화를 기능을 활성화하기만 하면 조정 없이 실현 가능합니다. 넓은 주파수 범위의 토크를 완만하게 감소함으로써, 이전에 비해 보다 큰 안정성을 확보할 수 있습니다.

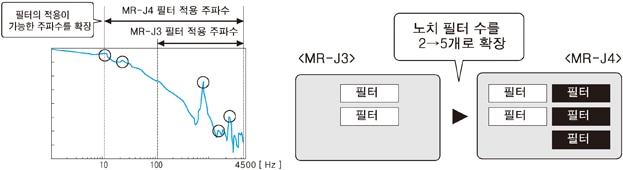
기계 공진 억제 필터 확장
필터 구조의 선진화에 의해 적용 주파수 범위를 100Hz~4500Hz에서 10Hz~4500Hz로 확장하였습니다. 또한, 동시에 적용 가능한 필터수를 2개에서 5개로 확장함으로써, 기계의 진동 억제 성능을 향상하였습니다.
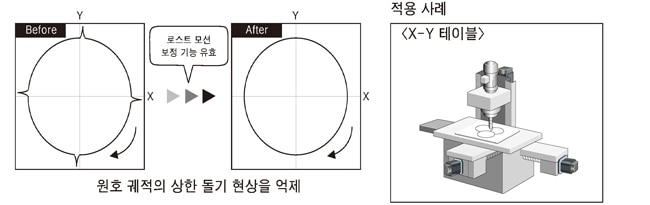
로스트 모션 보정 기능
XY 테이블 등의 궤적 제어에서 원호 궤적의 정밀도를 향상하였습니다.
마찰, 비틀림 등의 영향에 의해 서보 모터 회전 방향 전환시에 발생하는 상한 돌기 현상을 억제합니다.
* MR-J4W2-B/MR-J4W3-B는 대응하지 않습니다.
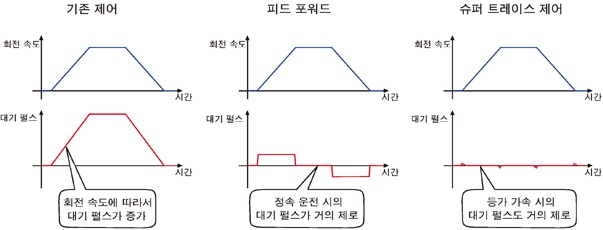
슈퍼 트레이스 제어
정속 운전시는 물론 등가감속시 누적 펄스를 거의 0으로 할 수 있는 제어입니다. 강성이 높은 장치에서 궤적 정밀도를 향상시키는 것이 가능합니다.
* MR-J4W2-B/MR-J4W3-B는 대응하지 않습니다.
용도에 적합한 다양한 기능
* 대응하는 컨트롤러를 사용하십시오.
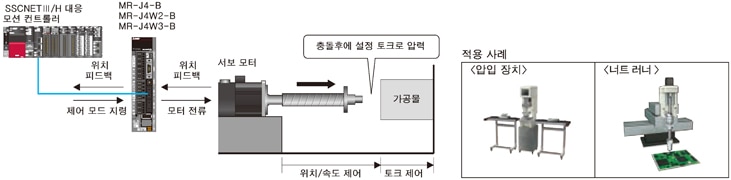
압력 제어 

위치/속도 제어에서 정지하지 않고 자유롭게 토크 제어로 전환됩니다. 워크가 누름 및 삽입, 캡 조임, 나사 조임 등 위치 제어에서 토크 제어로 전환하는 애플리케이션에서 속도나 토크의 급변이 없이 기계의 부하 절감, 고품질 성형이 가능합니다.
* MR-J4-B/MR-J4W2-B/MR-J4W3-B만 대응합니다.
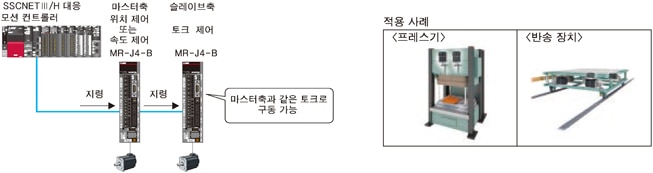
마스터 슬레이브 운전 기능
MR-J4-B에서는 드라이버 간 통신에 의해 마스터축의 토크를 슬레이브축에 송신하여, 그 토크를 지령으로 슬레이브축을 토크 제어 운전할 수 있습니다. 마스터축에서 슬레이브축에 대한 토크 데이터의 송신은 SSCNETⅢ/H를 이용하여 실행하므로, 특별한 배선 추가는 필요하지 않습니다.
스케일 계측 기능 
MR-J4-GF/MR-J4-B/MR-J4W2-B*1 서보 앰프*2에서는 세미 클로즈드 제어 상태에서 스케일 계측 엔코더를 접속하여 스케일 계측 엔코더의 위치 정보를 컨트롤러에 송신할 수 있습니다.
스케일 계측 기능을 이용하면, 리니어 엔코더 및 동기 엔코더의 데이터를 서보 앰프 경유로 서보 시스템 컨트롤러에 송신할 수 있으므로 배선이 절감됩니다.
*1. MR-J4W2-0303B6은 대응하지 않습니다.
*2. 사용하는 기계단 엔코더에 대응하는 서보 앰프(MR-J4-GF/MR-J4-GF-RJ/MR-J4-B/MR-J4-B-RJ)를 사용하십시오.
표준 서보 앰프에서 다양한 제어ㆍ구동 시스템에 대응
대응 서보 모터
MR-J4 시리즈 서보 앰프는 표준으로 회전형 서보 모터, 리니어 서보 모터, 다이렉트 드라이브 모터의 구동이 가능합니다* .
* 일부 비대응 기종이 있습니다. 조합에 대해서는 카탈로그의 "라인업"을 참조하십시오.

1축/2축/3축 서보 앰프
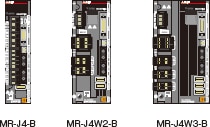
SSCNETⅢ/H 대응 서보 앰프는 1축형에 추가하여 2축 일체형, 3축 일체형을 라인업하였습니다.
제어 축수에 따라 유연한 시스템 구성이 가능합니다.
풀 클로즈드 제어 대응
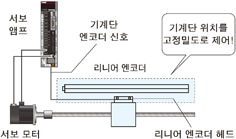
MR-J4 시리즈 서보 앰프는 표준으로 풀 클로즈드 제어에 대응합니다.*1
기계단의 고정밀도 제어를 실현합니다.*2
*1. 2선식 시리얼 리니어 엔코더에 대응합니다. 4선식 시리얼 및 펄스열 인터페이스(ABZ상 차동 출력 타입)의 리니어 엔코더에는 MR-J4-GF-RJ/MR-J4-B-RJ/MR-J4-A-RJ 서보 앰프에서 대응합니다.
*2. 일부 비대응 기종이 있습니다. 카탈로그의 "라인업"을 참조하십시오.
폭넓은 전원, 용량 라인업

MR-J4-B/MR-J4-A 서보 앰프에서는 주회로 전원 3상 AC200V, 3상 400V, 단상 AC100V에 추가하여 DC48V/24V 사양을 라인업하였습니다. 또한, 30 W* ~55KW까지의 폭넓은 용량에 대응합니다.
MR-J4-GF서보 앰프에서는 주회로 전원 3상 AC200V, 3상 400V 사양을 라인업하였습니다. MR-J4-GF-RJ/MR-J4-B-RJ/MR-J4-A-RJ는 DC 전원 입력에도 대응하도록 하였습니다.
* 30 W는 DC48V/24V 전원입니다.
최대 지령 펄스 주파수, 지령 펄스

범용 인터페이스 대응 MR-J4-A 서보 앰프는 최대 지령 펄스 주파수 4Mpulses/s에 대응합니다. (차동 리시버 시)
또한, 오픈 컬렉터 시는 싱크 입력 및 소스 입력에 대응합니다.
위치결정 기능 내장으로 시스템 간소화 가능
MR-J4-GF(-RJ)와 MR-J4-A-RJ에 위치결정 기능 내장
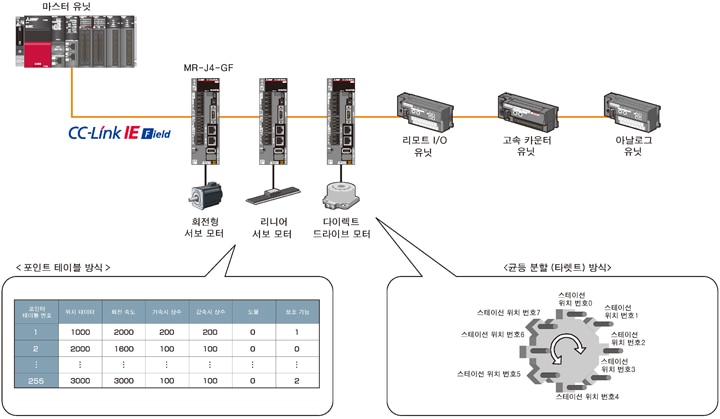
위치결정 기능을 내장하여, 포인트 테이블 방식, 프로그램 방식* , 균등 분할 분할 (타렛트) 방식의 위치결정 운전이 가능합니다.
위치결정 유닛(지령 펄스) 없이 위치결정 시스템을 구축할 수 있습니다. 위치결정 지령은 CC-Link IE 필드 네트워크, 입출력 신호 또는 RS-422/RS-485 통신(최대 32축)에서 실행합니다. 위치결정 데이터는 MR Configurator2에서 쉽게 설정할 수 있습니다.
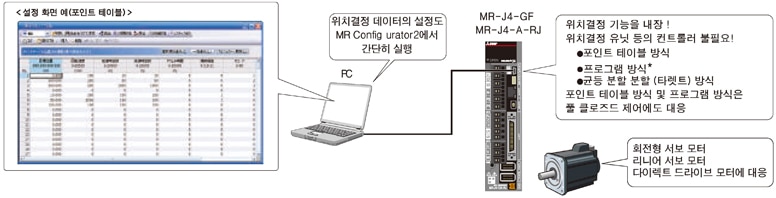
* 프로그램 방식은 MR-J4-A-RJ뿐입니다.
포인트 테이블 방식

위치 데이터 (목표 위치), 회전 속도, 가감속 시정수 등을 파라미터 감각으로 설정할 수 있습니다. 최대 255점의 포인트 테이블의 설정이 가능합니다.
포인트 테이블 번호를 선택하여 기동 신호로 위치결정 운전을 실행합니다.
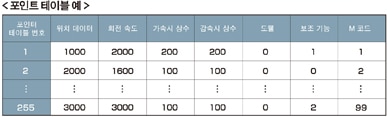
* MR-J4-A-RJ 서보 앰프의 경우, 포인트 테이블은 서보 앰프의 푸시 버튼 및 MR-PRU03 파라미터 유닛에서도 설정할 수 있습니다.
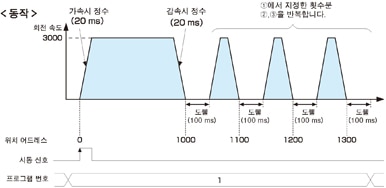
프로그램 방식*

전용 커맨드로 위치결정 프로그램을 작성할 수 있습니다. 프로그램 번호를 선택하여 기동 신호로 위치결정 운전을 실행합니다.
포인트 테이블보다 복잡한 위치결정 운전이 가능합니다. 최대 256개의 프로그램을 등록할 수 있습니다.
모든 프로그램의 스텝의 합계는 640스텝입니다.
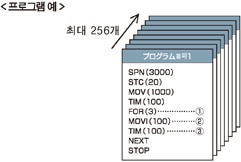
* 프로그램의 작성에는 MR Configurator2가 필요합니다.
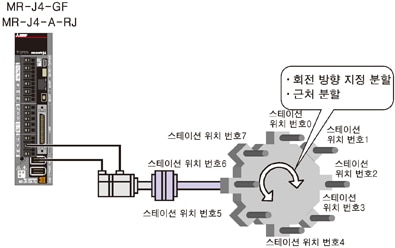
균등 분할 분할 (타렛트) 방식*
스테이션 위치 지정에 의한 위치결정(최대 255 분할)을 실행합니다.
스테이션 분할 개수 및 기계측/모터측 치수를 파라미터에서 설정하면 이동량의 자동 계산이 가능합니다. 스테이션 위치 번호를 선택하여 기동 신호로 위치결정 운전을 실행합니다.
회전 방향 지정 분할과 근처 분할의 설정이 가능합니다.
* 균등 분할 분할 (타렛트) 방식은 풀 클로즈드 제어 모드, 리니어 서보 모터 제어 모드에는 대응하지 않습니다.
위치결정 기능 내장에 편리한 기능 추가
* MR-J4-03A6-RJ는 대응하지 않습니다.
위치결정 기능에 편리한 기능을 추가하였습니다.
간이 캠 기능, 엔코더 팔로잉 기능, 펄스 입력 through 기능, 간이 캠 위치 보정 기능, 통신 기능 (MODBUS® RTU, Point to Point 위치결정, 현재 위치 래치)에 의해 폭넓은 용도에 따라 쉽게 위치결정 시스템을 구축할 수 있습니다.
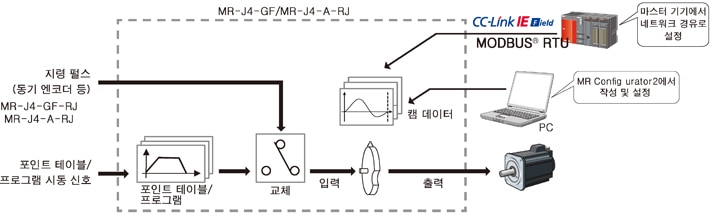
간이 캠 기능
MR Configurator2를 사용하여 다양한 패턴의 캠 데이터를 쉽게 작성할 수 있습니다. 외부에서의 지령을 간이 캠의 입력으로 하여 캠 데이터에 근거한 지령을 서보 모터에 출력합니다. 외부에서의 지령은 지령 펄스 또는 포인트 테이블/프로그램 No. 지령을 선택할 수 있습니다.
* 프로그램 방식은 MR-J4-A-RJ뿐입니다.
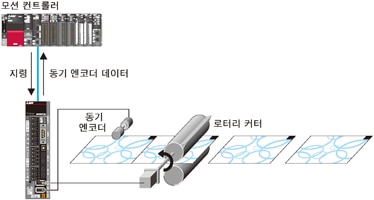
엔코더 팔로잉 기능/펄스 입력 through 기능*

엔코더 팔로잉 기능은 동기 엔코더의 AB상 출력 신호를 서보 앰프의 지령 펄스로 수집하여 캠 데이터에 근거한 지령을 서보 모터에 출력합니다.
시트 길이, 절단기축의 원주 및 시트 동기 구간에 맞는 캠 데이터를 미리 설정하면, 컨베이어축과 절단기축이 동기한 시스템을 구축할 수 있습니다. 동기 엔코더로부터의 입력은 4Mpulses/s까지 대응합니다.
지령 펄스 입력 through 기능은 동기 엔코더에서의 AB상 펄스를 후축으로 출력합니다. 2축째 이후도 컨베이어 축에 동기한 제어가 가능합니다.
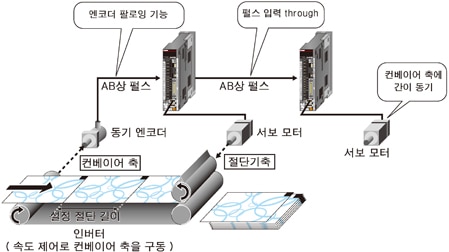
* MR-J4-GF-RJ는 AB상 펄스 입력 through 기능, MR-J4-A-RJ는 지령 펄스 입력 through 기능이 됩니다.
간이 캠 위치 보정 기능*

마크 센서가 ON 시, 이송 현재 위치를 가져와 서보 앰프 내에서 보정량을 계산하여 절단기축을 보정합니다.
기준 위치의 차이를 보정하면, Corner mark 등에 맞추어 차단할 수 있습니다.
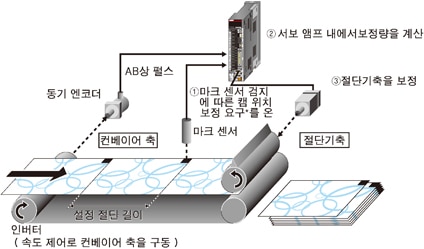
* 캠 위치 보정 요구는 MR-J4-GF-RJ는 터치 프로브 입력, MR-J4-A-RJ는 마크 센서 입력이 됩니다.
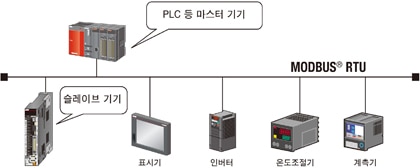
통신 기능 (MODBUS® RTU)
표준 대응 RS-422/RS-485 통신 (미쓰비시전기 범용 AC 서보 프로토콜)에 추가하여 RS-485 통신 (MODBUS® RTU 프로토콜)을 지원합니다.
MODBUS® RTU 프로토콜에서는 펑션 코드 03h (유지 레지스터 읽기) 등에 대응합니다.
외부 기기에 의한 서보 앰프의 제어 및 감시가 가능합니다.
주) 1. MR-J4-A-RJ 전용 RJ-45 대응 케이블 및 RJ-45 대응 중계 커넥터 단자대가 필요합니다.
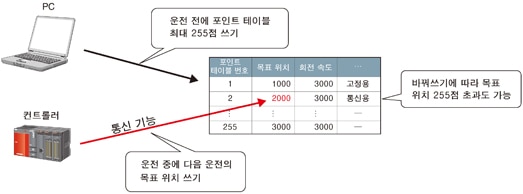
통신 기능 (Point to Point 위치결정)
포인트 테이블의 목표 위치를 미리 설정해 두면, 최대 255점의 Point to Point 위치결정이 가능합니다.
통신 기능을 이용하여 운전 중에 다음 포인트 테이블의 목표 위치를 변경하면, 유연한 위치결정이 가능합니다.
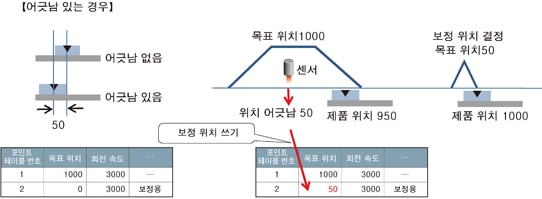
통신 기능 (현재 위치 래치)
마크 검출 기능 (현재 위치 래치* )에서 래치한 데이터를 바탕으로 포인트 테이블 (목표 위치)을 씀으로써 목표 위치를 보정할 수 있습니다.
* 마크 검출 신호가 ON 되면, 현재 위치를 래치합니다. 래치한 데이터는 통신 기능으로 읽을 수 있습니다.
사용 예: 반송 팔레트상에 제품이 50 어긋나 탑재되어 있는 경우의 위치 보정
포인트 테이블 번호1 (목표 위치 1000)을 지정하여 기동합니다.
운전 중에 마크 검출 기능에서 위치 차이를 측정하여, 위치 오차 50을 보정용 포인트 테이블 번호2의 목표 위치에 씁니다.
운전 완료 후(제품이 50 어긋난 위치에서 정지)에 포인트 테이블 번호2를 지정하여 기동하면, 제품이 50 이동하여 올바른 위치로 이동합니다.
CC-Link IE 필드에 의한 올 라운드인 네트워크
All in One 네트워크
컨트롤러 분산 제어ㆍI/O 제어ㆍ모션 제어를 통합하는 올 라운드인 필드 네트워크입니다.
하나의 네트워크에 PLCㆍI/Oㆍ고속 카운터ㆍ서보 앰프ㆍ인버터ㆍ표시기 등의 필드 기기를 접속함으로써, 목적이나 용도에 따라 최적의 네트워크를 제공합니다.
라인 및 장치, 기기의 레이아웃에 따라 스타형ㆍ라인형ㆍ링형* 에 의한 유연한 배선을 실현합니다.


* 심플 모션 유닛은 링형은 대응하지 않습니다.
All in One 엔지니어링 소프트웨어
GX Works3*1이 있으면, 하나의 소프트웨어에서 시퀀스 프로그램, CC-Link IE 필드 네트워크 설정, 심플 모션 설정, 서보 앰프 조정 등 시스템 설계에서 기동ㆍ보수까지 대응할 수 있습니다.
*1. GX Works2의 경우, 서보 지원 소프트웨어 MR Configurator2는 미쓰비시전기 FA 사이트에서 다운로드하여 무상으로 사용할 수 있습니다.
- 시스템 구성에서 서보 파라미터까지 "GX Works3" 하나로 설정
- CC-Link IE 필드 네트워크 파라미터는 쉽게 설정
- MR Configurator2와 일체화하여 서보 파라미터를 쉽게 설정
- 유닛 라벨, 유닛 FB를 드래그"드롭 하기만 하면 쉽게 시퀀스 프로그램 작성
- 다양한 보조 기능으로 위치결정 데이터를 쉽게 작성 가능
- 파라미터를 설정하기만 하면 쉽게 동기 제어
- 캠 데이터는 마우스로 드래그"드롭, 수치 입력으로 쉽게 작성
- 원터치 조정에 의해 서보 조정을 자동으로 실행
- 여러 축이 동시에 동작하는 장치에서 다축 조정 기능으로 장치의 시운전 시간 단축
- 시뮬레이션에 의해 실제 기기 없이 프로그램의 디버그
가능
CC-Link IE 필드에 의한 올 라운드인 구동 시스템
CC-Link IE 필드 네트워크 표준 대응

MR-J4-GF(-RJ)는 CC-Link IE 필드 네트워크에 표준 대응합니다.
고속/심리스/Ethernet에 대응하는 CC-Link IE 필드 네트워크에 접속할 수 있습니다.
CC-Link IE 필드 네트워크 간단 위치결정
MR-J4-GF(-RJ)는 마스터 유닛과 조합한 경우, 포인트 테이블 방식이나 균등 분할 (타렛트) 방식에 의한 위치결정 운전이 가능합니다.
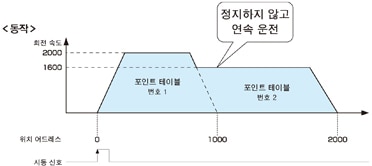
포인트 테이블 방식은 포인트 테이블 번호를 세트하여 기동 신호를 ON 합니다. 위치결정 유닛 없이 I/O 감각으로 위치결정 운전을 실행할 수 있습니다. 다음 포인트 테이블을 정지하지 않고 연속 운전하는 것도 가능합니다.
균등 분할 (타렛트) 방식은 스테이션 분할 개수의 파라미터 설정에서 이동량을 자동 계산합니다.
위치결정 기능에 대해서는 카탈로그를 참조하십시오.
CC-Link IE 필드 네트워크 모션 제어
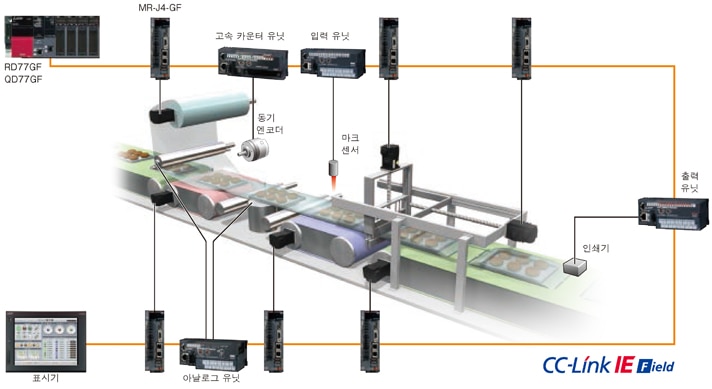
MR-J4-GF(-RJ)는 심플 모션 유닛과 조합한 경우, 간단한 파라미터 설정과 시퀀스 프로그램에서의 기동에 의해 선진 동기 제어ㆍ보간 제어를 실행할 수 있습니다. 속도, 토크 제어도 가능하며, 컨버팅 등의 장치에도 대응 가능합니다.
또한, 동기 통신 기능 대응 리모트 I/O를 사용하면, 서보 앰프에 대한 지령 주기에 동기한 시스템을 구축할 수 있습니다.

서보 지령 통신 주기에 맞추어 동기 엔코더, 시트 장력, 인쇄기 등 다양한 기기와 동기 가능합니다.
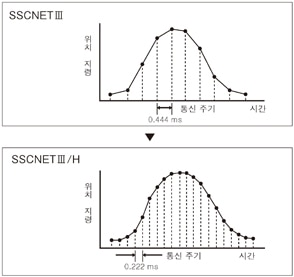
SSCNETⅢ/ H에 의한 서보 시스템의 고응답화
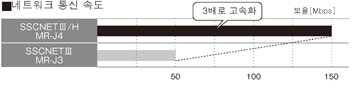
통신 속도를 3배로 향상
데이터 송수신을 기존 제품 대비 3배의 쌍방향 150Mbps (단방향 300Mbps 상당)로 고속화하였습니다. 시스템의 응답성이 비약적으로 향상됩니다.
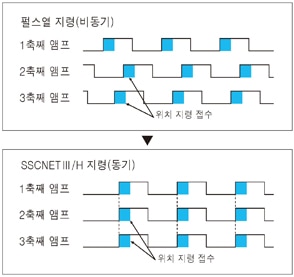
동기 통신에 의해 장치의 고성능화 실현
SSCNETⅢ/H에서는 완전 동기 통신이 가능합니다. 고정밀의 동기가 필요한 인쇄 기계, 식품 기계, 가공기 등 장치의 고성능화를 실현합니다.
0.222ms로 지령 통신 주기를 고속화
통신 주기 0.222ms의 고속 시리얼 통신에 의해 장치의 보다 원활한 제어가 가능합니다.
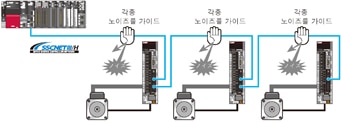
광통신에 의한 내노이즈성의 비약적 향상
광 케이블의 채택에 의해 동력선, 외부 장치 등에서 들어가는 노이즈를 철저 가이드합니다. 메탈 케이블에 비해 내노이즈성이 비약적으로 향상되었습니다.
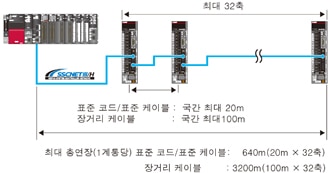
최대 3200m의 장거리 배선에 대응
1 계통당 최대 3200m (국 간 최대 100m × 32축)의 장거리 배선 가능 대규모 시스템에도 대응할 수 있습니다.
* 모든 축을 SSCNETⅢ/H로 접속한 경우입니다.
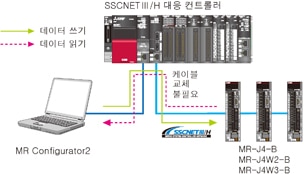
네트워크에 의한 집중 관리
컨트롤러와 서보 앰프 간에 대량의 서보 데이터를 실시간으로 통신 가능 또한, 모션 컨트롤러, 심플 모션 유닛에 접속한 PC에서 MR Configurator2를 사용할 수 있습니다. 여러 서보 앰프의 파라미터 설정 및 모니터 등 정보를 집중 관리할 수 있습니다.
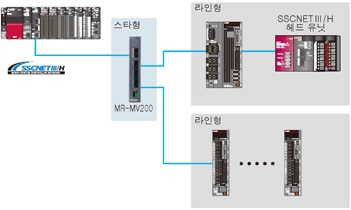
통신망 위상
광분기 유닛 MR-MV200* 을 사용하면, SSCNETⅢ/H에서 스타형, 라인형 배선으로 분산 배치할 수 있습니다. 메인터넌스시 장치 전체를 정지하지 않고 장치 가동률을 향상시킬 수 있습니다.
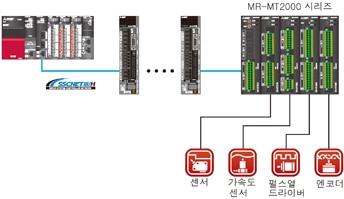
모션 제어에 동기한 입출력 신호 실현
센싱 유닛 MR-MT2000* 을 사용하면, SSCNETⅢ/H 경유로 I/O, 아날로그 입출력, 펄스 입출력 및 엔코더 I/F 유닛 접속이 가능합니다.
범용 펄스열 대응 드라이버 및 센서, SSI 엔코더 등의 입출력을 모션 제어 주기와 동기하여 장치의 고속화, 고정밀화를 실현합니다.
* 광분기 유닛 MR-MV200과 센싱 유닛 MR-MT2000에 대해서는
"카탈로그 다운로드"를 이용하십시오.