![]()
MELSEC-Q 시리즈
![]()
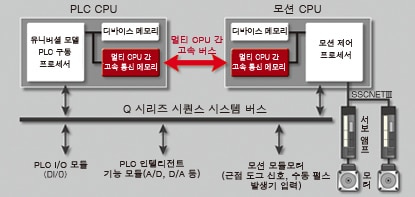
PLC CPU와 모션 CPU에 의한 멀티 CPU 제어
복잡한 서보 제어는 모션 CPU에서, 이외의 기계 제어ㆍ정보 제어는 PLC CPU에 담당하도록 함으로써 처리 부하를 분산할 수 있습니다.
용도에 따라 모션 CPU, PLC CPU를 선택함으로써 유연한 시스템 구성을 실현할 수 있습니다.
모션 CPU의 프로그램은 모션 SFC로 기술합니다.
<멀티 CPU 간 고속 버스>
■ CPU 간 교신 전용 멀티 CPU 간 고속 버스 탑재
CPU 전용 멀티 CPU 간 고속 버스에 의해 0.88ms마다 최대 14K워드의 고속 데이터 교신이 가능합니다.
■ 멀티 CPU 간 고속 통신 주기는 모션 제어에 동기하고 있으므로 제어 손실 절감
[시퀀스 프로그램]
● 스캔 처리에 적절한 래더 기술(조건 제어 중시)
![]()
● 시퀀스 제어(다입출력 점수, 복수 동작 대응)
● 이상 검출 시 시스템 정지 처리
[모션 SFC 프로그램]
● 이벤트 처리에 적절한 SFC 기술(순차 제어 중시, 이벤트 응답성 추구)
![]()
● 서보 고속 응답(기동) ● 위치결정 어드레스, 속도 데이터의 연산, 속도 변경
● 멀티태스크, 분기 기능에 의한 고기능화
<모션 전용 시퀀스 명령>
■ 모션 전용 시퀀스 명령이 새롭게 다시 태어났습니다.
<멀티 CPU 간 동기 인터럽트 시퀀스 프로그램>
■ 모션 연산 주기(0.88ms)와 동기한 인터럽트 시퀀스 기능을 추가하여 래더에 의한 실시간 처리가 가능합니다.
사용 예
①모터 실제 현재값을 지정 포인트에 비교하여, 통과하면 PLC 출력을 ON 합니다. (비교 처리의 오차는 래더의 스캔 타임에 영향을 받지 않고 0.88ms 이내에 처리됩니다.)
②여러 대의 모션 CPU에 대해서 동시 기동을 합니다.
고응답 제어
택-타임 단축의 요구에 따라 모션 연산 주기 0.22ms/4축을 실현하였습니다.
연산 주기 0.44ms에 대해서도 10축까지의 제어가 가능하므로 고응답 제어에 대응합니다.
<매끄러운 곡선을 필요로 하는 모션 제어에 최적>
모션 컨트롤러에서의 지령 데이터는 0.22ms마다 서보 앰프에 전송 가능합니다.
모션 컨트롤러와 서보 앰프(MR-J4-B), 서보 모터(HG-KR 모터:4194304PLS/rev)를 조합하면,
모션의 연산 주기의 고속화와 함께 고속으로 매끄러운 동작을 실현할 수 있습니다.

제어의 흐름
배선 절감화, 공간 절약
MR-J4 시리즈의 2축 일체형 서보 앰프, 3축 일체형 서보 앰프와 조합하면, 배선수, 부품 점수를 대폭 절감할 수 있습니다.
예를 들어, 3축 일체형 "MR-J4W3-B"를 사용하면, 서보 앰프의 설치 면적이 약 30% 절감되므로 공간을 크게 절약할 수 있습니다.
고속 동기 네트워크 SSCNET III/H
- 데이터 송수신을 기존 제품 대비 3배의 쌍방향 150Mbps(단방향 300Mbps)로 고속화하였습니다. 시스템의 응답성이 비약적으로 향상됩니다.
- 0.22ms로 지령 통신 주기를 고속화
- 동기 통신에 의해 장치의 고성능화 실현
SSCNETⅢ/H에서는 완전 동기 통신이 가능합니다. 고정밀의 동기가 필요한 장치의 고성능화가 가능합니다. - 최대 1600m의 장거리 배선에 대응
1 계통당 최대 1600m(국 간 최대 100m×16축)의 장거리 배선 가능 - SSCNETⅢ/H 대응 제품과 SSCNETⅢ 대응 제품의 혼재 가능
동일 계통에 SSCNETⅢ/H 대응 서보 앰프와 SSCNETⅢ 대응 서보 앰프를 혼재하여 사용할 수 있습니다.
(혼재시 통신 속도:쌍방향 50Mbps)
※ SSCNET (Servo System Controller Network)
어드밴스드 동기 제어
기어, 샤프트, 변속기, 캠 등의 기계 장치를 소프트웨어로 대체한 동기 제어를 쉽게 실현할 수 있습니다.
축마다 동기 제어를 기동, 정지할 수 있습니다. 동기 제어의 축과 위치결정 제어의 축의 혼재가 가능합니다.
동기 제어에는 어드밴스드 동기 제어와 기계 장치 프로그램을 사용하는 2개의 방식이 있으며, 어느 하나를 선택할 수 있습니다.
<제어의 흐름>
<동기 제어 파라미터>
● 파라미터 설정만으로 쉽게 동기 제어를 실행할 수 있습니다.
● 주축의 이동량을 클러치 경유로 출력축에 전달할 수 있습니다.
● 지령 생성축은 제어 축으로 카운트되지 않으므로 출력축을 제어 축수만큼 사용할 수 있습니다.
안전 감시 기능
이중화 입출력 신호의 상태를 확인하는 안전 신호 감시 기능에 추가하여 IEC 61800-5-2의 정지 기능(STO, SS1, SS2), 기타 기능(SOS, SSM, SBC, SLS)을 표준 탑재하고 있습니다.
기능 안전의 동작 조건은 PLC CPU와 모션 CPU의 래더 회로로 자유롭게 프로그래밍 할 수 있습니다.
유럽 기계 지령의 적합 규격 "EN ISO 13849-1:2008 카테고리 3 PLd", "EN62061/IEC61508 SILCL2"에 대응합니다.
속도 감시 기능
모터의 속도가 안전 속도를 초과하지 않는지 여부를 모션 CPU와 PLC CPU에서 감시합니다.
안전 신호 감시 기능
모션 CPU, PLC CPU, 안전 신호 유닛을 사용하여 안전 입력 신호를 감시할 수 있습니다.
엔지니어링 환경 MELSOFT MT Works2
보다 사용하기 쉽게 진화한 엔지니어링 환경이 모션 컨트롤러의 시스템 설계ㆍ프로그램그에서 디버그ㆍ보수까지 강력하게 지원합니다.
<시스템 설계>
- 그래픽 시스템 설정 화면에서 서보 앰프ㆍ각종 유닛을 쉽게 설정할 수 있습니다.
- 번거로운 전자 기어의 설정도 기계 구성(감속비, 볼스크류 피치 등)을 입력하면 쉽게 설정할 수 있습니다.
SSCNET 구성
전자 기어 설정
<프로그래밍>
- 모션 컨트롤러의 프로그램 작성을 다양한 편리 기능으로 지원합니다.
- 필요한 모션 SFC 프로그램을 유용 소스 프로젝트에서 유용 대상 프로젝트에 드래그"드롭으로 쉽게 유용 가능합니다.
서보 프로그램 일람
<기동ㆍ조정>
- 시뮬레이터 기능으로 실제 기기 없이 모션 SFC 프로그램, 어드밴스드 동기 제어의 디버그가 가능합니다.
- 모션 연산 주기에 동기한 데이터 수집과 파형 표시에 의해 동작 확인, 트러블슈팅을 강력하게 지원합니다.
시뮬레이터
디지털 오실로스코프
기능 일람
| 모션 컨트롤러 | ||
|---|---|---|
| Q173DSCPU | Q172DSCPU | |
| 서보 앰프 I/F | SSCNETⅢ/H  |
|
| 2 계통 | 1 계통 | |
| 접속 서보 앰프 | MR-J4-B |
|
| 최대 제어 축수 | 32축 | 16축 |
| 연산 주기 | 0.22ms~ | |
| 엔지니어링 환경 | MELSOFT MT Works2, MR Configurator2 ※1 | |
| 프로그램 언어 | 모션 SFC | |
| 제어 방식 |
위치 제어, 속도 제어 , 토크 제어, 압력 제어, 동기 제어, 캠 제어, 어드밴스드 동기 제어
|
|
| 위치결정 제어 | 직선 보간, 원호 보간, 궤적 제어, 헬리컬 보간, 위치 추종 제어, 정위치 정지 속도 제어, 고속 진동 제어, 속도 위치 전환 제어 | |
| 가감속 처리 |
사다리꼴 가감속, S자 가감속, 어드밴스드 S자 가감속 |
|
| 수동 제어 | JOG 운전, 수동 펄스 발생기 운전, 동시 JOG 운전 | |
| 제어 내용 변경 기능 |
현재값 변경, 목표 위치 변경 기능 , 토크 제한값 변경, 속도 변경 |
|
| 원점복귀 방식 |
근점 도그식 1, 근점 도그식 2, 스케일 원점 신호 검출식, 카운트식 1, 카운트식 2, 카운트식 3, 데이터 세트 방식 1, 데이터 세트 방식 2, 도그 크래들식, 스토퍼 정지 방식 1, 스토퍼 정지 방식 2, 리미트 스위치 겸용식, Doggles 원점 신호 기준식 |
|
| 보조 기능 | 비상 정지 기능, H/W 스트로크 리미트 기능, S/W 스트로크 리미트 기능, 절대 위치 시스템, 앰프 없음 운전 기능, 무한 길이 이송 기능, 임의의 데이터 모니터 기능, 마크 검출 기능, 비전 시스템 접속 기능, 소프트웨어 보안 키 기능, 고속 읽기 기능, 리미트 스위치 출력 기능 , 캠 자동 생성 기능 |
|
※1: MR Configurator2는 MELSOFT MT Works2에 포함되어 있습니다.