![]()
MELSEC-Q 시리즈
![]()

고속 동기 네트워크 SSCNET III/H
- 데이터 송수신을 기존 제품 대비 3배의 쌍방향 150Mbps(단방향 300Mbps)로 고속화하였습니다. 시스템의 응답성이 비약적으로 향상됩니다.
- 0.22ms로 지령 통신 주기를 고속화
- 동기 통신에 의해 장치의 고성능화 실현
SSCNETⅢ/H에서는 완전 동기 통신이 가능합니다. 고정밀의 동기가 필요한 장치의 고성능화가 가능합니다. - 최대 1600m의 장거리 배선에 대응
1 계통당 최대 1600m(국 간 최대 100m×16축)의 장거리 배선 가능 - SSCNETⅢ/H 대응 제품과 SSCNETⅢ 대응 제품의 혼재 가능
동일 계통에 SSCNETⅢ/H 대응 서보 앰프와 SSCNETⅢ 대응 서보 앰프를 혼재하여 사용할 수 있습니다.
(혼재시 통신 속도:쌍방향 50Mbps)
※ SSCNET (Servo System Controller Network)
동기 통신에 의해 장치의 고성능화 실현
SSCNETⅢ/H에서는 완전 동기 통신이 가능합니다. 고정밀의 동기가 필요한 인쇄기계, 식품 기계, 가공기 등 장치의 고성능화를 실현합니다.
네트워크에 의한 집중 관리
컨트롤러와 서보 앰프 간에 대량의 서보 데이터를 실시간으로 통신 가능
심플 모션 유닛 QD77MS에 접속한 PC에서 MELSOFT MR Configurator2를 사용할 수 있습니다.
여러 서보 앰프의 파라미터 설정, 모니터 정보 등을 집중 관리할 수 있습니다.
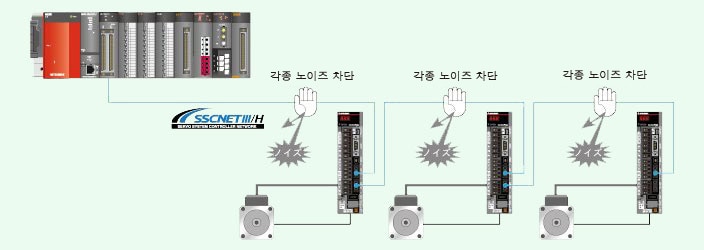
광통신에 의한 내노이즈성의 비약적 향상
SSCNETⅢ/H에서는 광 케이블을 채택하고 있습니다.
동력선, 외부 장치 등에서 침입되는 노이즈 등에 대하여 대노이즈성이 비약적으로 향상되었습니다.
위치결정 제어
데이터 테이블 방식에 의해 위치결정 제어를 실행할 수 있습니다.
- 데이터 설정 어시스턴트 기능으로 쉽게 설정할 수 있습니다.
- 오프라인 시뮬레이션, 지령 속도 자동 계산, 보조 원호 자동 계산 등의 기능으로 보다 쉽게 위치결정 데이터를 설정할 수 있습니다.
동기 제어
기어, 샤프트, 변속기, 캠 등의 기계 장치를 소프트웨어로 대체한 동기 제어를 쉽게 실현할 수 있습니다.
- 파라미터 설정만으로 쉽게 동기 제어를 실행할 수 있습니다. 복잡한 프로그램의 작성은 필요하지 않습니다.
- 축마다 동기 제어의 기동/정지를 실행할 수 있습니다. 동기 제어의 축과 위치결정 제어의 축의 혼재가 가능합니다.
- 주축의 이동량을 클러치 경유로 출력축에 전달할 수 있습니다.
캠 제어
다양한 패턴의 캠 데이터도 쉽게 작성할 수 있습니다.
- 지금까지의 전자 캠 제어와 다르게 편리성 높게 캠을 사용할 수 있습니다.
- 스트로크, 속도 가속도 약동을 그래프상에서 확인하면서 설정할 수 있습니다.
- 캠 데이터의 섬네일 표시에서 작성한 캠 데이터도 간편하게 확인할 수 있습니다.
- CSV 형식에서의 캠 데이터의 가져오기와 내보내기를 실행할 수 있습니다.
제어의 흐름
PLC CPU에서 심플 모션의 위치결정을 기동합니다.
심플 모션은 지정된 위치결정 데이터 No.에서 운전을 시작하여, 운전 패턴이 종료될 때까지 운전을 계속합니다.
기존 제품과의 높은 호환성
위치결정 유닛(QD75MH)의 프로젝트 및 시퀀스 프로그램은 심플 모션 유닛(QD77MS)의 프로젝트로 쉽게 대체 가능합니다.
기능 일람
| 심플 모션 유닛 | |||
|---|---|---|---|
| QD77MS16 | QD77MS4 | QD77MS2 | |
| 서보 앰프 접속 방식 | SSCNETⅢ/H (150Mbps) |
||
| 서보 앰프 간 최대 접속 거리[m] |
100 | ||
| 접속 서보 앰프 | MR-J4(W)-B |
||
| 최대 제어 축수 | 16축 | 4축 | 2축 |
| 연산 주기[ms] | 0.88 / 1.77 | 0.88~ | |
| 엔지니어링 환경 | 심플 모션 유닛 설정 도구 ※1 MR Configurator2 | ||
| 제어 방식 |
PTP(Point To Point) 제어, 위치 제어, 속도 제어、 토크 제어, 압력 제어, 캠 제어, 동기 제어, 2축/3축/4축 직선 보간, 2축 원호 보간, 궤적 제어, 속도ㆍ위치 전환 제어(ABS/INC), 위치ㆍ속도 전환 제어(INC)
|
||
| 제어 단위 | mm, inch, degree, PLS | ||
| 위치결정 데이터수 | 600데이터(위치결정 데이터 No.1~600)/축 (MELSOFT GX Works2, 시퀀스 프로그램에서 설정 가능) |
||
| 가감속 방식 | 사다리꼴 가감속, S자 가감속 | ||
| 수동 제어 | JOG 운전, 수동 펄스 발생기 운전, 인칭 운전 | ||
| 제어 내용 변경 기능 |
현재값 변경, 목표 위치 변경 기능 |
||
| 원점복귀 방식 |
근점 도그식, 카운트식 1, 카운트식 2, 데이터 세트 방식, 스케일 원점 신호 검출식 |
||
| 보조 기능 | 비상 정지 기능, H/W 스트로크 리미트 기능, S/W 스트로크 리미트 기능, 절대 위치 시스템, 앰프 없음 운전 기능 , 무한 길이 이송 기능, 임의의 데이터 모니터 기능, 마크 검출 기능, 플래시 ROM 백업, 유닛 에러 이력 수집 기능, M코드 출력 기능, 디지털 오실로스코프 기능 , 캠 자동 생성 기능 |
||
| 입출력 점유 점수 | 32점(I/O 할당:인텔리전트 기능 유닛 32점) | ||
| DC5V 내부 소비 전류[A] | 0.75 | 0.6 | 0.6 |
| 중량[kg] | 0.16 | 0.16 | 0.15 |
※1:심플 모션 유닛 설정 도구는 MELSOFT GX Works2에 포함되어 있습니다.