![]()
MELSEC iQ-R 시리즈
![]()


CC-Link IE 필드 네트워크
All-in-One 네트워크

하나의 네트워크에 연결
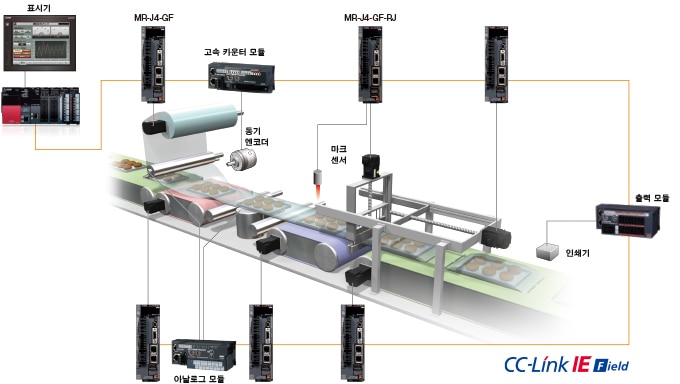
CC-Link IE 필드 네트워크
CC-Link IE 필드 네트워크는 모션 제어에 필요한 동기성과 Ethernet의 범용성을 양립시킨 네트워크입니다.
하나의 네트워크에서 서보 앰프, I/O, 고속 카운터 등 다양한 필드 기기를 자유롭게 접속할 수 있습니다.
All-in-One 엔지니어링 소프트웨어
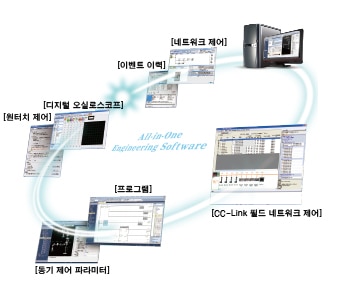
하나의 엔지니어링 소프트웨어로 쉽게 설정, 진단
엔지니어링 소프트웨어는 다양한 기능과 기술을 갖춘 간단하고 사용하기 쉬운 도구입니다.
펑션 블록(FB) 등 시퀀스 프로그램의 작성은 물론, 심플 모션 유닛의 파라미터 설정에서 서보 조정, 디버그까지 다양한 기능을 하나의 엔지니어링 소프트웨어만으로 대응할 수 있습니다.
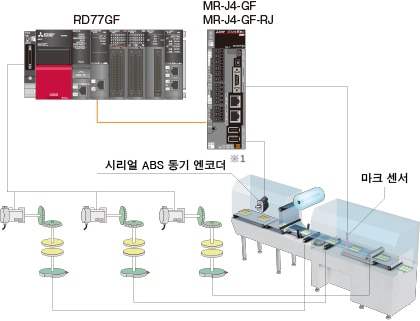
서보 제어에 동기한 입출력
서보 지령 통신 주기에 맞추어 동기 엔코더값, 시트 장력값, 인쇄 출력 등 다양한 데이터를 입출력할 수 있으므로 모션 제어의 폭이 넓어집니다.
[서보 앰프 지령 통신 주기에 동기한 입출력 예]
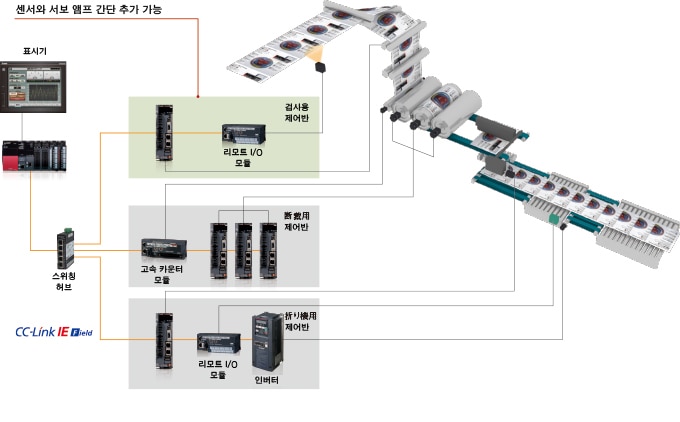
유연한 네트워크 배선
스위칭 허브를 접속하여 스타형, 라인형, 스타ㆍ라인형이 혼재된 네트워크 구축을 설정 없이 변경할 수 있습니다. 스위칭 허브의 빈 포트에 케이블을 연결하는 간단 배선에 의해 보다 자유롭게 필드 기기를 설치할 수 있습니다.
CC-Link IE 필드 네트워크 대응 서보 앰프 MR-J4-GF

- MR-J4 시리즈의 강력한 제어 기능을 기반으로 CC-Link IE 필드 네트워크에 표준 대응합니다.
- 심플 모션 유닛 RD77GF와의 조합으로 선진 동기 제어ㆍ보간 제어가 가능합니다.
- 여러 축의 위치결정, 동기 제어 등 선진 모션 제어가 가능한 "모션 모드"와 1축에서의 위치결정에 대응하는 "I/O 모드"가 있으며, 용도에 따라 구분하여 사용할 수 있습니다.
μsec 오더의 동기 제어에 추종. 고정밀도 위치결정 용도에.

여러 축의 보간 제어, 동기 제어, 속도ㆍ토크 제어 등 고정밀도로 폭넓은 모션 제어를 필요로 하는 장치에 적합합니다.

- [심플 모션 유닛]
- [모션 모드축]
모션 제어와 위치결정 제어의 조합

여러 축의 보간 제어, 동기 제어, 속도ㆍ토크 제어 등 고정밀도로 폭넓은 모션 제어를 필요로 하는 장치에 1축 위치결정이 가능한 축을 쉽게 추가할 수 있습니다.

- [심플 모션 유닛]
- [모션 모드축]
- [I/O 모드축]
위치결정 제어의 폭넓은 용도에 대응.

CC-Link IE 내장 CPU 등의 마스터국에 1축 위치결정이 가능한 축을 심플 모션 유닛을 사용하지 않고 간단 접속할 수 있습니다.

- [CC-Link IE 내장 CPU]
- [I/O 모드축]
마스터국으로의 기능
CC-Link IE 필드 네트워크 마스터ㆍ로컬 유닛 상당 링크 디바이스, 마스터국으로의 기능을 탑재하고 있습니다. ※1
모션 제어는 물론 네트워크의 마스터로도 사용할 수 있으므로 시스템 구축 비용이 억제됩니다.

■ 1네트워크당 최대 링크 점수
| 항목 | RD77GF | 마스터 유닛 |
|---|---|---|
| 리모트 입력(RX), 리모트 출력(RY) | 각 16K점(16384점, 2KB) | 각 16K점(16384점, 2KB) |
| 리모트 레지스터(RWw, RWr) | 각 8K점(8192점, 16KB) | 각 8K점(8192점, 16KB) |
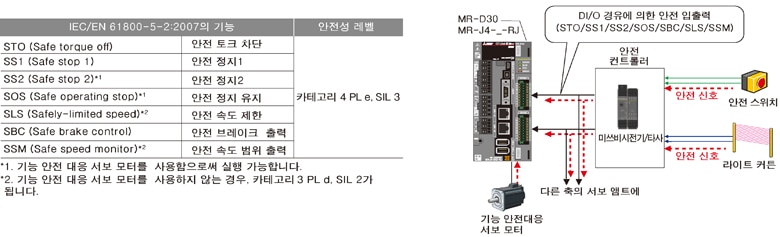
기능 안전
MR-D30 기능 안전 유닛에 대한 배선에서 카테고리 4 PL e, SIL 3에 대응 
MR-D30 기능 안전 유닛에 안전 입력 신호를 배선하여 카테고리 4 PL e, SIL 3에 대응합니다.
MR-D30측에서 안전 감시 기능을 실행하므로, 상위 컨트롤러에 따르지 않고 안전 감시 기능을 확장할 수 있습니다.
안전 감시 기능의 실현도 파라미터에서 쉽게 설정할 수 있습니다.
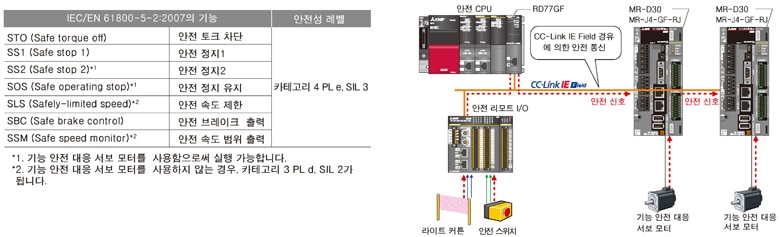
CC-Link IE 필드 네트워크에서 카테고리 4 PL e, SIL 3에 대응
안전 CPU R□SFCPU-SET와 심플 모션 유닛 RD77GF를 조합하여, RD77GF에 접속한 CC-Link IE 필드 네트워크를 경유하여 안전 CPU의 안전 신호 데이터를 받을 수 있습니다.*1*2 안전 신호는 안전 리모트 I/O에 접속하므로, 각 축의 MR-D30 기능 안전 유닛에 안전 입력 신호의 배선은 필요하지 않습니다.
- *1안전 CPU(R□SFCPU-SET)는 유닛 간 동기 기능을 사용할 수 없습니다.
- *2안전 CPU(R□SFCPU-SET)의 소프트웨어 버전 "07" 이후, 심플 모션 유닛(RD77GF)의 소프트웨어 버전 "05" 이후입니다.
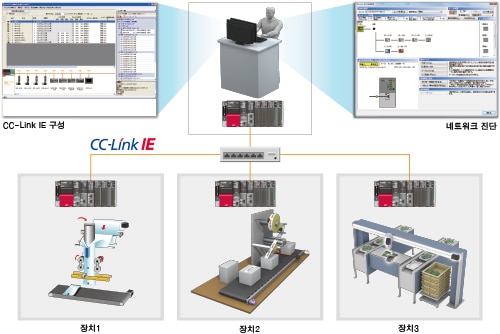
설정ㆍ진단 기능
사무실, 현장 어디에서나 파라미터 설정, 필드 기기의 정보를 수집할 수 있습니다.
파라미터 간단한 설정
CC-Link IE 필드 구성 화면에서 각 기기를 드래그"드롭하여 파라미터를 쉽게 설정할 수 있습니다.
네트워크 간단 진단
엔지니어링 소프트웨어에서 네트워크의 이상 위치를 단번에 파악할 수 있습니다. 트러블 발생시 이상 위치를 즉시 특정할 수 있으므로, Down Time이 감축됩니다.
모션 제어
위치결정, 속도ㆍ토크, 캠, 동기 등의 폭넓은 제어에 의해 X-Y 테이블, 포장기, 컨버팅 등 다양한 기계에 대응할 수 있습니다.
기계에 최적의 제어 및 기능을 선택하여 최적의 솔루션을 실현할 수 있습니다.

위치결정 제어(보간 기능, 궤적 제어)
시퀀스 프로그램에서 포인트 테이블 방식의 위치결정 데이터를 기동하면 쉽게 위치결정 제어가 가능합니다.
- 직선 보간, 2축 원호 보간, 치수 이송 및 연속 궤적 등 다양한 제어로 폭넓은 용도에 대응할 수 있습니다.
- 위치결정 어드레스, 속도 등을 시퀀스 프로그램에서 설정하여 간편하게 자동 운전할 수 있습니다.
- M코드, 스킵, 속도 변경, 목표 위치 변경 등 충실한 보조 기능이 내장되어 있습니다.
어드밴스드 동기 제어
기어, 샤프트, 클러치, 변속기, 캠 등의 기계 장치를 소프트웨어로 대체한 동기 제어에 추가하여 캠 자동 생성 기능으로 캠을 쉽게 생성할 수 있습니다. 축마다 동기 제어를 기동, 정지할 수 있으므로, 동기 제어 축과 위치결정 제어 축의 혼재가 가능합니다.
기능 일람
| 심플 모션 유닛 | ||||
|---|---|---|---|---|
| RD77GF32 |
RD77GF16 | RD77GF8 | RD77GF4 | |
| 최대 제어 축수 | 32축 | 16축 | 8축 | 4축 |
| 서보 앰프 접속 방식 | CC-Link IE Field (1Gbps) | |||
| 서보 앰프 간 최대 접속 거리[m] |
100 | |||
| 접속 서보 앰프 | MR-J4-GF, MR-J4-GF-RJ | |||
| 연산 주기[ms] | 0.5, 1.0, 2.0, 4.0 | |||
| 엔지니어링 환경 | MELSOFT GX Works3 | |||
| 제어 방식 | 위치결정 제어, 위치 제어, 속도 제어, 토크 제어, 속도ㆍ토크 제어 캠 제어 속도ㆍ위치 전환 제어(ABS/INC), 위치ㆍ속도 전환 제어(INC) |
|||
| 제어 단위 | mm, inch, degree, PLS | |||
| 위치결정 데이터수 | 600데이터(위치결정 데이터 No.1~600)/축 | |||
| 가감속 방식 | 사다리꼴 가감속, S자 가감속 | |||
| 수동 제어 | JOG 운전, 수동 펄스 발생기 운전, 인칭 운전 | |||
| 제어 내용 변경 기능 | 현재값 변경, 목표 위치 변경 기능 |
|||
| 원점복귀 방식 | 드라이버 원점복귀※1 | |||
| 보조 기능 | 비상 정지 기능, H/W 스트로크 리미트 기능, S/W 스트로크 리미트 기능, 절대 위치 시스템, 앰프 없음 운전 기능, 무한 길이 이송 기능, 임의의 데이터 모니터 기능 플래시 ROM 백업, M코드 출력 기능, 이벤트 이력 디지털 오실로스코프 기능, 캠 자동 생성 기능 |
|||
| 입출력 점유 점수 | 32점(I/O 할당:인텔리전트 기능 유닛 32점) | |||
| DC5V 내부 소비 전류[A] | 1.1 | |||
| 중량[kg] | 0.23 | |||
※1:드라이버(서보 앰프)에 설정된 원점복귀 방식을 사용합니다.