![]()
MELSEC iQ-R 시리즈

콘셉트

의 혁신적인 진화를 위해
●장치 선진화
●프로그램의 표준화

유연한 시스템 구축을 위해
●접속 기기와 연동

를 신속하게 기동하기 위해
●툴 강화·연계
●구동 기기의 조작성 향상

이상 시의 조기 발견·
진단을 위해
●예지 보전/예방 보전 ●사후 보전
●메인터넌스 프리

기존 자산의 효과적인 활용을 위해
●기존 기종과의 호환성
특장점
멀티 코어 프로세서를 탑재한 모션 유닛은 CC-Link IE TSN에 대응하여 더욱 빠르고, 더욱 큰 규모의 시스템을 구축할 수 있습니다.
●펑션 블록(FB)에서 위치결정 데이터를 입력하기만 하면 직선 보간 등을 쉽게 실행 가능합니다.
●하나의 네트워크에서 서보 앰프, 입출력 유닛 등을 접속하여 서보 시스템을 자유자재로 제어할 수 있습니다.
●일관된 엔지니어링 환경에서 시스템 설계부터 디버그, 메인터넌스까지 대응할 수 있습니다.
모션 유닛의 프로그래밍으로 PLC CPU와의 부하 분산이 가능하게 되어 축 수 확장과 성능 유지를 모두 실현할 수 있습니다.

![]()
![]()
RD78GHW
●최대 제어 축 수:
RD78GHV 128축/유닛
RD78GHW 256축/유닛
●최소 연산 주기*1: 31.25 [μs]
●ST언어의 프로그램 용량:
내장 ROM 최대 64[MB] + SD 메모리 카드

![]()
![]()
RD78G16/RD78G32
RD78G64
●최대 제어 축 수:
RD78G64 64축/유닛
●최소 연산 주기*1: 62.5 [μs] ![]()
●ST언어의 프로그램 용량:
내장 ROM 최대 16[MB] + SD 메모리 카드


생산 현장과 IT 시스템을 융합하는 오픈 통합 네트워크 CC-Link IE TSN
CC-Link IE TSN은 사이클릭 통신으로 실시간성을 보증한 제어를 실시하면서 IT 시스템과의 정보 통신이 혼재 가능한 네트워크입니다.
다양한 기기를 사용한 유연한 시스템 구축이 가능하고, 뛰어난 메인터넌스 기능을 갖추고 있기 때문에 공장 전체의 IIoT 인프라 구축에 최적화된 네트워크입니다.
*IIoT: Industrial Internet of Things


서보 앰프 MR-J5(W)-G



서보 앰프 MELSERVO-J5 시리즈는 독자적인 제어 엔진을 더욱 진화시킨 업계 최고 수준의 고성능 서보 앰프입니다.
CC-Link IE TSN과 접속할 수 있기 때문에 고속ㆍ고정밀 모션 제어가 가능합니다.다축 일체형 서보 앰프는 하나의 유닛으로 서보 모터 2~3대를 구동할 수 있기 때문에 공간 절약, 배선 절감, 비용 절감을 실현할 수 있습니다.
프로그래밍
국제적인 표준 규격인 PLCopen® Motion Control FB의 라이브러리를 사용하여 프로그래밍할 수 있습니다.
모션 유닛은 ST 언어, PLC CPU는 래더, FBD/LD, ST 언어로 프로그래밍합니다.
고속 제어와 복잡한 연산 등 필요에 따라 어느 유닛으로 프로그래밍할지 선택할 수 있습니다.
●프로그래밍 부하 경감
래더, FBD/LD, ST 언어로 기동하는 고객을 위한 사양.
PLC CPU만으로 프로그래밍할 수 있기 때문에 설계자의 부담을 줄일 수 있습니다.
PLCopen® Motion Control FB를 사용하기 때문에 프로그램 작성자가 아니더라도 프로그램을 이해할 수 있으므로 메인터넌스 시간을 단축할 수 있습니다.
●부하 분산
●사이클 타임 단축
고속 제어와 복잡한 연산을 필요로 하는 고객을 위한 사양.
[처리 내용]
- PLC CPU는 모션 유닛의 프로그램을 기동
- 모션 유닛으로 배정밀도 부동 소수점 연산, 다항식 연산
- 모션 제어를 실시
모션 유닛으로 연산 처리를 실행하기 때문에 PLC CPU와의 부하 분산이 가능하게 되어 사이클 타임을 단축할 수 있습니다.
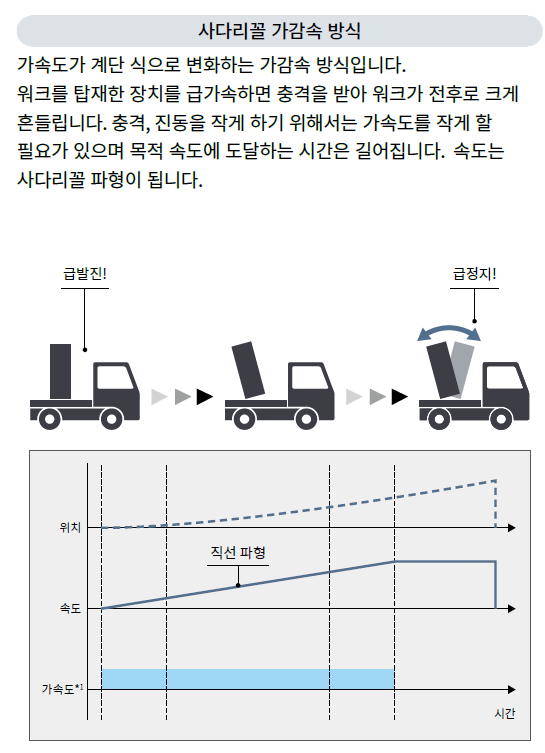
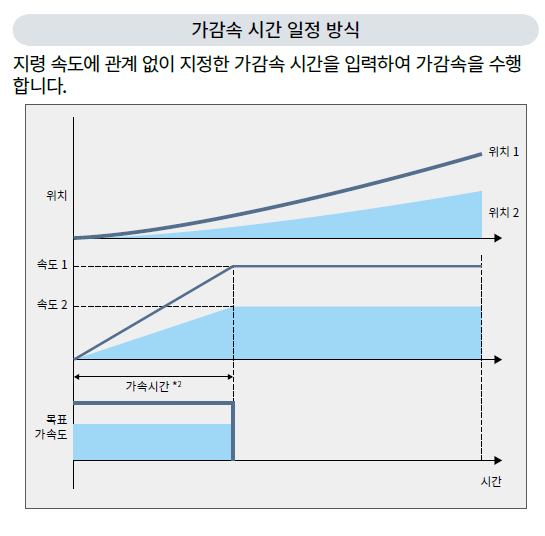
가감속 처리
가감속 처리는 사다리꼴 가감속, 저크 가감속, 가감속 시간 일정 방식이 있으며 용도에 따라 사용합니다.
장치가 흔들리지 않도록 천천히 가속하고 가속 중에는 저크를 유지, 일정 속도로 변하는 경우에는 저크를 되돌립니다.저크를 적절히 조정하면 부드러운 가속을 실현하면서 목적 속도까지 도달하는 시간을 단축할 수 있습니다.
저크는 액셀레이터와 같습니다.
속도는 S자 파형이 됩니다.
동기 제어
동기 제어는 기어, 샤프트, 클러치, 변속기, 캠 등의 기계 기구를 펑션 블록(FB)과 마찬가지로 제어합니다.
●동기 모듈의 접속 개수, 조합 방법을 자유롭게 선택할 수 있기 때문에 효율적인 동기 제어를 할 수 있습니다.
●캠 데이터에는 캠, 로터리 캠이 있습니다.
●캠 번호를 자유롭게 바꾸어 복잡한 캠 제어도 가능합니다.
●동기 제어와 일반적인 위치결정 제어가 혼재 가능합니다.
●로터리 용 캠을 GX Works3 또는 FB로 작성할 수 있습니다.
●동기 엔코더를 사용한 동기 제어가 가능합니다.
![[포장기의 프로그램(FBD)의 예]](fa/products/cnt/ssc/pmerit/ssciqr/rd78g/images/feat02.gif)
동기 엔코더
동기 엔코더를 실제 엔코더에 할당하여 펑션 블록(FB)을 작성하면 간단히 동기 제어를 할 수 있습니다.
동기 엔코더의 분해능으로 지령 펄스의 무게를 기어 동작의 FB, 또는 파라미터로 환산할 수 있습니다.
![[포장기의 프로그램(FBD)의 예]](fa/products/cnt/ssc/pmerit/ssciqr/rd78g/images/feat09.gif)
캠 제어
캠 제어로는 동작에 따른 연산 프로파일(캠 데이터) 작성하여 출력 축을 제어합니다.
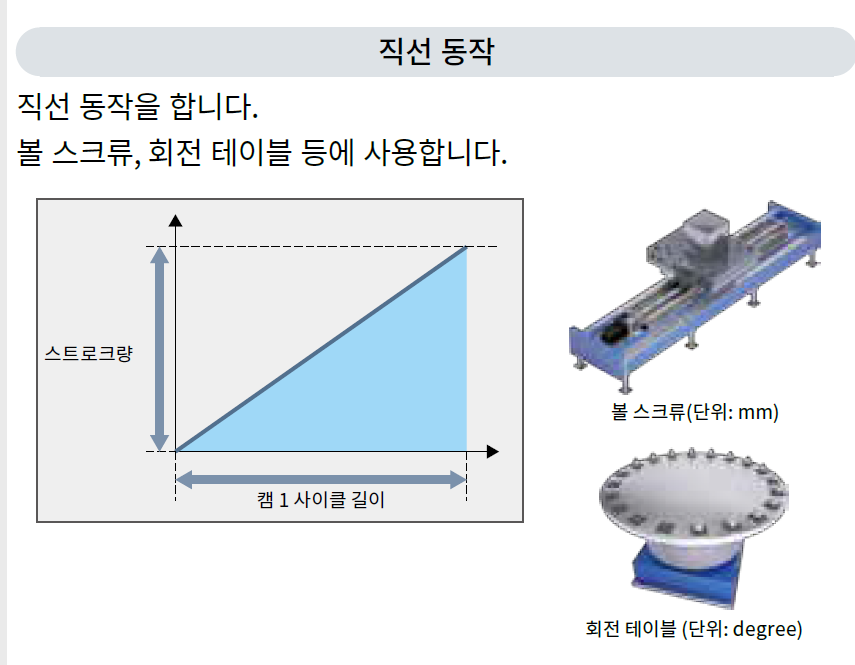
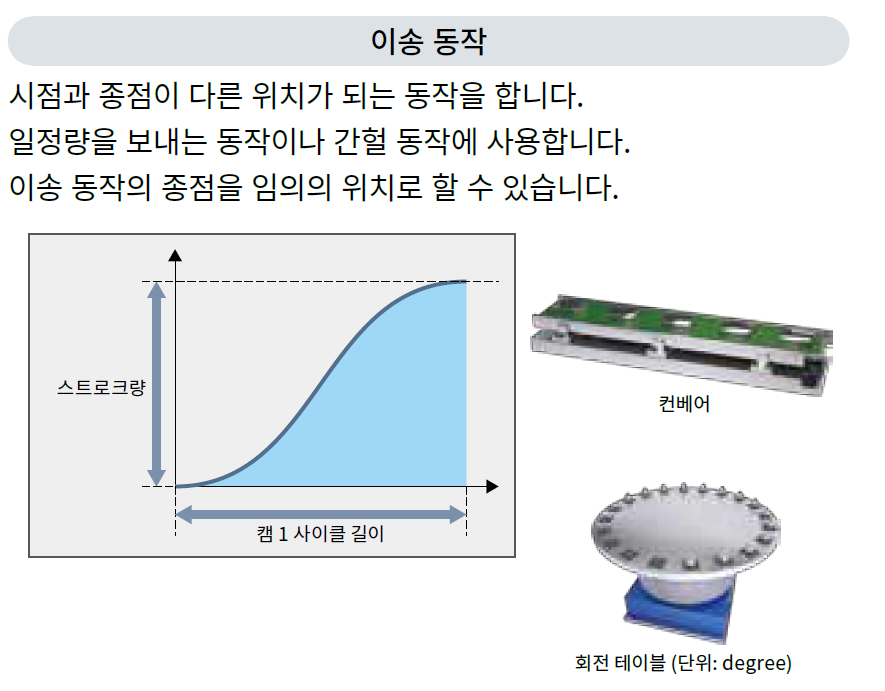
캠 동작에는 직선 동작, 왕복 동작, 이송 동작이 있으며 용도에 따라 선택할 수 있습니다.
시점과 종점이 같은 위치가 되는 동작을 합니다.
기계적인 캠은 이에 해당합니다.
터치 프로브 기능(마크 검출 기능)
트리거 입력 신호를 검출한 타이밍에 임의의 데이터를 래치하는 기능입니다.
트리거 입력 신호에는 리모트 I/O를 사용할 수 있습니다.
GX Logviewer
PLC, 모션 유닛의 그래프 데이터를 일원화하여 데이터 분석과 표시를 쉽게 연동할 수 있습니다.
모션 유닛의 상태를 실시간으로 오프라인 샘플링할 수 있습니다
데이터 로깅 기능
엔지니어링 툴에서 입력한 로깅 설정(트리거 조건이나 데이터 수집 조건)을 바탕으로 모션 시스템의 데이터를 지정된 간격으로 수집하고, 결과를 데이터 로깅 파일에 저장하는 기능입니다.
모션 시스템으로는 최대 10가지 설정분의 데이터 로깅을 동시에 실행할 수 있습니다.
실시간 모니터
최대 32개의 모션 시스템 수집 데이터를 실시간으로 표시할 수 있습니다.
엔지니어링 환경
MELSOFT GX Works3
GX Works3은 프로젝트 작성과 메인터넌스 작업을 용이하게 하는 기능을 탑재했습니다.
GX Works3의 모션 제어 설정에 따라 모션 유닛의 파라미터 설정에서 프로그래밍, 디버그, 보수까지 모든 상황에 대응할 수 있습니다.

[네트워크 구성 설정]
●드래그 & 드롭과 그래픽 화면 표시를 통해 네트워크의 직관적인 설정 환경을 실현했습니다.
[자동 검출]
●[접속/절단한 기기 검출] 버튼을 클릭하면 각 슬레이브 기기의 접속 상황을 자동 검출하고 CC-Link IE TSN 구성을 생성하여 화면에 표시합니다.
●구조화 프로그래밍으로 프로그램 기능별로 모듈화 할 수 있기 때문에 가독성이 향상됩니다.
●ST 언어에 의한 프로그램의 부품화로 프로그램 자산의 재이용성이 향상됩니다.
●GX Works3의 조작성 통일로 한눈에 감각적으로 조작할 수 있습니다.
●라이브러리 라인업 강화로 프로그램 작성 공정 수를 절감할 수 있습니다.
●프로그램 부품의 드래그 & 드롭으로 프로그래밍을 간소화할 수 있습니다.
●GX Works3 시뮬레이터로 디버그 단계부터 실제 기기 없이 프로그램의 동작을 확인할 수 있어 기동 시간 단축을 도모할 수 있습니다.*1
●모션 유닛으로 제어하는 축, 입출력 신호 등을 라벨 변수로 관리하기 때문에 프로그램의 유용성이 높아 작업 효율이 향상됩니다.
●모션 유닛으로 추가한 글로벌 라벨은 PLC CPU의 프로그램으로 사용할 수 있습니다.
사양 일람
![]()
![]()
| 모션 유닛 | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| RD78GHW | RD78GHV | RD78G64 | RD78G32 | RD78G16 | RD78G8 | RD78G4 | |||
| 최대 제어 축 수 | 256 | 128 | 64 | 32 | 16 | 8 | 4 | ||
| 최소 연산 주기[μs]※1 | 31.25 | 62.5 |
|||||||
| 서보 앰프 접속 방식 | CC-Link IE TSN (1 Gbps) | ||||||||
| 최대 국 간 거리 [m] | 100 | ||||||||
| 접속 서보 앰프 | MR-J5-G,MR-J5W-G상세 보기 | ||||||||
| 제어 방식 | 위치 제어, 속도 제어, 토크 제어, 동기 제어 | ||||||||
| 위치결정 제어 | 위치 제어, 직선 보간(최대 4축), 원호 보간(2축) | ||||||||
| 가감속 처리 | 사다리꼴 가감속, 저크 가감속, 가감속 시간 일정 방식 | ||||||||
| 프로그램 언어 | PLC CPU: PLC 프로그램, FBD/LD 언어, ST 언어 모션 유닛: ST 언어 |
||||||||
| 원점 복귀 기능 | 데이터 세트 방식, 드라이버 방식 원점 복귀※2 | ||||||||
| 수동 제어 | JOG 운전 | ||||||||
| 보조 기능 | 긴급 정지, 하드웨어 스트로크 리미트, 소프트웨어 스트로크 리미트, 절대 위치 시스템, 데이터 로깅, 가감속 시간 변경, 목표 위치 변경 |
||||||||
| 공통 기능 | 터치 프로브, 슬레이브 에뮬레이터, 이벤트 이력, 서보 데이터 모니터링 |
||||||||
| 엔지니어링 환경 | MELSOFT GX Works3 | ||||||||
| 입출력 점유 개수 | 32개+빈 슬롯 16개 | 32개 | |||||||
| DC 5V 내부 소비 전류 [A] | 2.33 | 1.93 | |||||||
| 질량 [kg] | 0.44 | 0.26 | |||||||
※1: 최소 연산 주기는 기종과 제어 축 개수에 따라 다릅니다.
※2: 드라이버(서보 앰프)에 설정된 원점 복귀 방식을 사용합니다.