![]()
MELSERVO-J4 Solutions vol.03 얼라이먼트 장치
현장의 과제를 완벽하게 해결!

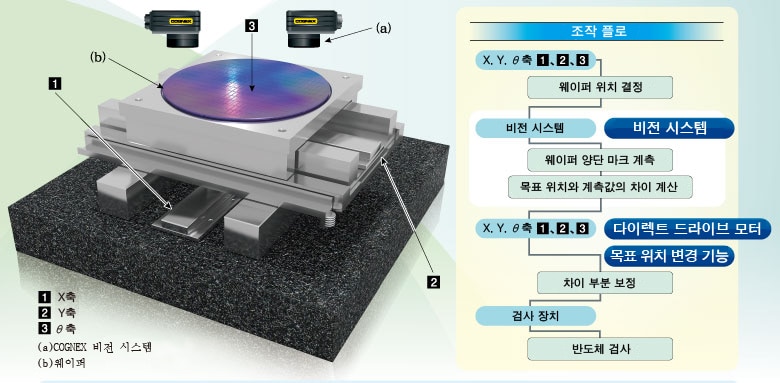

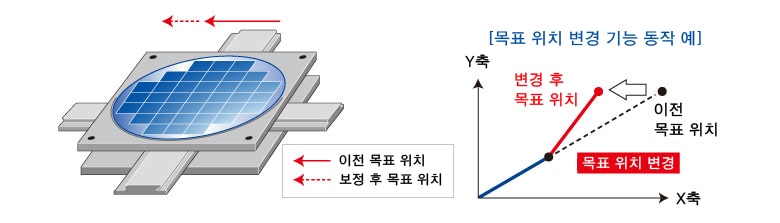
비전 시스템에서 쉽게 웨이퍼의 현재 위치를 읽을 수 있으므로, 목표 위치를 보정하여 신속하게 이동할 수 있습니다.


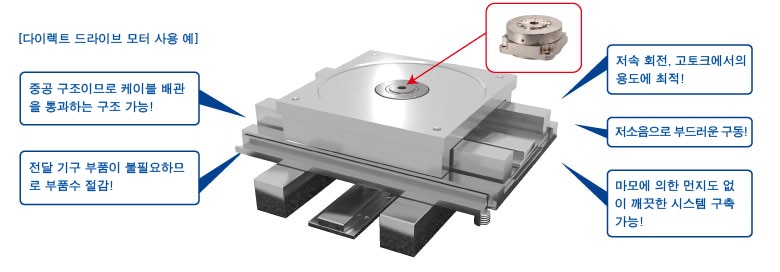
회전축에 다이렉트 드라이브 모터를 사용함으로써, 고응답 , 고정밀도로 안정된 위치결정을 실현합니다.
저속 회전, 고토크에서의 사용에도 적합합니다.

위치결정 중에 비전 시스템의 위치 데이터에서 위치 보정할 때, 다시 위치결정 기동하지 않고 목표 위치로 이동할 수 있으므로 택-타임이 단축됩니다.
모델 시스템
기기 구성
| 모션 CPU:Q172DSCPU | 서보 앰프:MR-J4-B, MR-J4W2-B | 서보 모터:TM-RFM, LM-H3 |
| PLC CPU:Q06UDEHCPU | GOT:GOT1000 시리즈 | 입출력 모듈:QX40, QY40P |
| 기본 베이스:Q35DB |

서보 앰프를 설정합니다.
![]()
모션 컨트롤러의 IP 어드레스를 설정합니다.
![]()

비전 시스템의 Ethernet 통신, 비전 프로그램 동작에 관한 파라미터를 설정합니다.
![]()
간단한 비전 시스템 전용 명령을 기술하기만 하면 비전 시스템에서의 위치 데이터를 수신할 수 있습니다.
- Home >
- 제품정보 >
- 드라이브 제품 >
- AC서보 >
- MELSERVO-J4 >
- MELSERVO-J4 용도사례