![]()
MELSERVO-J4 Solutions vol.05 추출 로봇
현장의 과제를 완벽하게 해결!


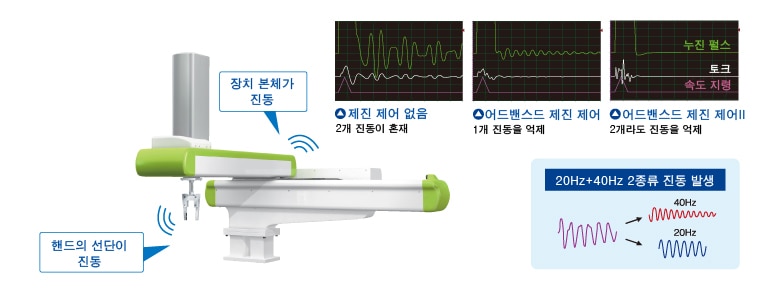
3 관성계의 기계에 대응하는 진동 억제 알고리즘에 의해 저주파 진동을 2개 동시에 억제할 수 있습니다.
인출 로봇의 토대에서 핸드의 끝 부분까지 복수의 진동 성분이 있는 경우에 효과를 발휘합니다.

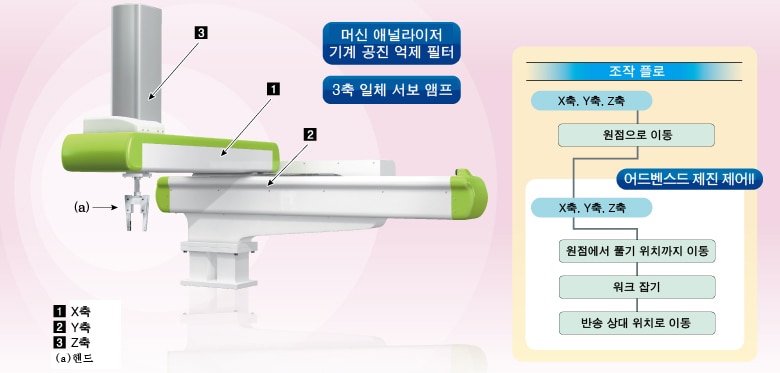
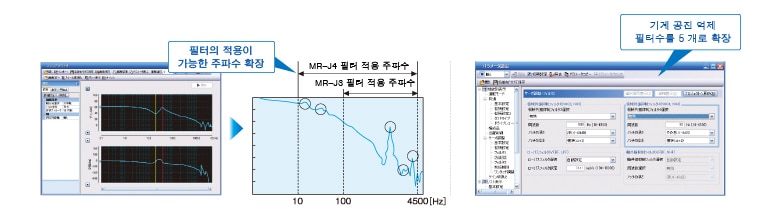
머신 애널라이저를 사용하여 기계계의 주파수 특성을 분석합니다. 다음에 5개의 기계 공진 억제 필터를 사용하여 진동을 억제할 수 있습니다.

- SSCNETⅢ/H 대응 서보 앰프는 펄스열에 비해 대폭적으로 배선을 절감할 수 있습니다.
- 3축 일체형 서보 앰프는 주회로/제어 회로 전원, 주변기기, 제어 신호선 등의 접속을 3축으로 공통화하여 배선수 및 기기수를 대폭 절감할 수 있습니다.
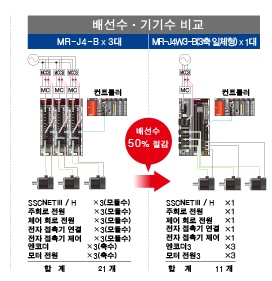
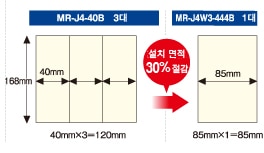
3축 일체형 서보 앰프에서는 MR-J4-B를 3대 사용하는 경우에 비해 설치 면적을 30% 절감할 수 있습니다.
모델 시스템
기기 구성
| PLC CPU:Q06UDEHCPU | 심플 모션 모듈:QD77MS4 | 서보 앰프:MR-J4W3-B |
| 기본 베이스:Q35DB | 입출력 모듈:QX40, QY40P | 서보 모터:HG-KR |
| GOT:GOT 1000 시리즈 |

서보 앰프를 설정합니다.
![]()

기본 파라미터 1의 계산 화면을 사용하면, 전자 기어의 설정도 기계 제원을 입력하여 필요한 파라미터를 계산합니다.
![]()
진동 억제 모드 선택에서 3 관성 모드를 선택하면 어드밴스드 제진 제어Ⅱ가 유효가 됩니다.
![]()
각 축의 위치결정 데이터를 설정합니다.